











专利摘要
本发明公开了一种无人驾驶车辆认知能力测试系统,该系统包括无人驾驶车辆和车载记录设备,二者通过通信接口进行有线连接,其中,车载记录设备用于向无人驾驶车辆输入认知能力测试任务,并接收和存储无人驾驶车辆认知能力测试输出的数据;无人驾驶车辆通过测试任务输入程序接收到测试任务后,重新建立串口连接,开启相应程序输出测试数据到车载记录设备中,无人驾驶车辆认知能力测试的测试任务输入和测试数据输出采用统一接口、参数和数据传输格式,但是数据内容的具体格式不同;所述通信接口采用RS-232接口。
权利要求
1.一种无人驾驶车辆认知能力测试系统,该系统包括无人驾驶车辆和车载记录设备,二者通过通信接口进行有线或者无线连接,其中,
车载记录设备用于向无人驾驶车辆输入认知能力测试任务,并接收和存储无人驾驶车辆认知能力测试输出的数据;
无人驾驶车辆通过测试任务输入程序接收到测试任务后,重新建立串口连接,开启相应程序输出测试数据到车载记录设备中,无人驾驶车辆认知能力测试的测试任务输入和测试数据输出采用统一接口、参数和数据传输格式,但是数据内容的具体格式不同,
其中,测试任务包括基本认知能力测试项目、高级认知能力测试项目和综合认知能力测试项目。
2.根据权利要求1所述的系统,其特征在于,基本认知能力测试项目测试无人驾驶车辆认知交通信号以及行驶灯语和笛声的能力。
3.根据权利要求2所述的系统,其特征在于,基本认知能力测试包括B-测试和I-测试,其中B-测试是指被测车辆处于静止状态,识别标准的视听觉信息,要求无人驾驶车辆输出代表相应视听觉信息的图像、文字、符号或声音,考查指标为正确识别视听觉信息的个数以及识别所需的时间;I-测试是指被测车辆处于静止状态,在以下三种情况下:①对不标准的视听觉信息的认知;②在具有特征绑定的条件下对相应视听觉信息目标的提取和认知;③在多元信息条件下所需视听觉信息目标的提取和认知,要求无人驾驶车辆输出代表相应视听觉信息的图象、文字、符号或声音,I测试考查指标为正确识别视听觉信息的个数以及识别所需的时间。
4.根据权利要求3所述的系统,其特征在于,高级认知能力测试属于动态测试,是在基本认知能力测试的基础上、无人驾驶车辆和被测视听觉信息处于相对的运动状态下,测试无人驾驶车辆在一定的交通场景中对交通环境和交通行为的认知能力。
5.根据权利要求4所述的系统,其特征在于,高级认知能力测试包括两种类型:一类是视听觉信息动而无人驾驶车辆不动,另一类是视听觉信息不动而无人驾驶车辆动。
6.根据权利要求1-5任一项所述的系统,其特征在于,综合认知能力测试属于动态测试,在基本认知能力和高级认知能力测试的基础上,测试无人驾驶车辆对交通场景的综合认知能力以及自主驾驶和智能导航的能力。
7.根据权利要求6所述的系统,其特征在于,综合认知能力测试分为面向城市道路环境、城际公路环境、乡村道路环境以及三者结合的道路环境,在一定长的距离内,无人驾驶车辆需要识别障碍物、交通信号、行驶灯语、笛声、交通基础设施和交通现象,并按照要求完成自主驾驶和智能导航,考查指标为识别视听觉信息的个数以及识别所需时间、指定任务的完成情况。
8.根据权利要求1所述的系统,其特征在于,在车载记录设备向无人驾驶车辆传输数据时,车载记录设备作为主设备负责传输握手包和数据包;无人驾驶车辆作为从设备只回复握手包和ACK包。
9.根据权利要求8所述的系统,其特征在于,当一个文件开始传送前,车载记录设备会根据文件的大小,计算出当前数据包的文件帧号,将按倒序添加到每个数据包的文件帧号中,当无人驾驶车辆接收到一个数据包后,应检查数据内容中的文件帧号,将分包传送的文件拼接起来;当无人驾驶车辆接收有重复的文件帧号时,需丢弃重复帧号的数据;当无人驾驶车辆接收到文件帧号为0的数据包后,文件传输结束。
10.根据权利要求1所述的系统,其特征在于,在无人驾驶车辆向车载记录设备传输测试数据时,无人驾驶车辆作为主设备负责传输握手包和数据包,车载记录设备作为从设备只回复握手包和ACK包,无人驾驶车辆定时向车载记录设备发送测试数据。
11.根据权利要求10所述的系统,其特征在于,无人驾驶车辆即时发送检测目标的数据,即无人驾驶车辆需分别向车载记录设备发送定时数据格式和即时数据格式两种格式的数据内容。
12.根据权利要求11所述的系统,其特征在于,车载记录设备根据自身时钟对收到的定时数据格式数据包进行时间统计,若无人驾驶车辆在远远小于指定间隔时间内发送数据,则车载记录设备不再进行记录,车载记录设备将对收到的即时数据格式数据包进行时间和内容统计,车载记录设备对于任何数据包编号重复的数据内容不做重复记录。
13.一种无人驾驶车辆认知能力测试方法,该方法包括步骤:
车载记录设备用于向无人驾驶车辆输入认知能力测试任务,并接收和存储无人驾驶车辆认知能力测试输出的数据;
无人驾驶车辆通过测试任务输入程序接收到测试任务后,重新建立与车载记录设备的串口连接,开启相应程序输出测试数据到车载记录设备中,无人驾驶车辆认知能力测试的测试任务输入和测试数据输出采用统一接口、参数和数据传输格式,但是数据内容的具体格式不同,其中,测试任务包括基本认知能力测试项目、高级认知能力测试项目和综合认知能力测试项目。
14.根据权利要求13所述的方法,其特征在于,基本认知能力测试项目测试无人驾驶车辆认知交通信号以及行驶灯语和笛声的能力。
15.根据权利要求13所述的方法,其特征在于,基本认知能力测试包括B-测试和I-测试,其中B-测试是指被测车辆处于静止状态,识别标准的视听觉信息,要求无人驾驶车辆输出代表相应视听觉信息的图像、文字、符号或声音,考查指标为正确识别视听觉信息的个数以及识别所需的时间;I-测试是指被测车辆处于静止状态,在以下三种情况下:①对不标准的视听觉信息的认知;②在具有特征绑定的条件下对相应视听觉信息目标的提取和认知;③在多元信息条件下所需视听觉信息目标的提取和认知,要求无人驾驶车辆输出代表相应视听觉信息的图象、文字、符号或声音,I测试考查指标为正确识别视听觉信息的个数以及识别所需的时间。
16.根据权利要求14所述的方法,其特征在于,高级认知能力测试属于动态测试,是在基本认知能力测试的基础上、无人驾驶车辆和被测视听觉信息处于相对的运动状态下,测试无人驾驶车辆在一定的交通场景中对交通环境和交通行为的认知能力。
17.根据权利要求15所述的方法,其特征在于,高级认知能力测试包括两种类型:一类是视听觉信息动而无人驾驶车辆不动,另一类是视听觉信息不动而无人驾驶车辆动。
18.根据权利要求13-17任一项所述的方法,其特征在于,综合认知能力测试属于动态测试,在基本认知能力和高级认知能力测试的基础上,测试无人驾驶车辆对交通场景的综合认知能力以及自主驾驶和智能导航的能力。
19.根据权利要求13所述的方法,其特征在于,综合认知能力测试分为面向城市道路环境、城际公路环境、乡村道路环境以及三者结合的道路环境,在一定长的距离内,无人驾驶车辆需要识别障碍物、交通信号、行驶灯语、笛声、交通基础设施和交通现象,并按照要求完成自主驾驶和智能导航,考查指标为识别视听觉信息的个数以及识别所需时间、指定任务的完成情况。
20.根据权利要求13所述的方法,其特征在于,在车载记录设备向无人驾驶车辆传输数据时,车载记录设备作为主设备负责传输握手包和数据包;无人驾驶车辆作为从设备只回复握手包和ACK包。
21.根据权利要求20所述的方法,其特征在于,当一个文件开始传送前,车载记录设备会根据文件的大小,计算出当前数据包的文件帧号,将按倒序添加到每个数据包的文件帧号中,当无人驾驶车辆接收到一个数据包后,应检查数据内容中的文件帧号,将分包传送的文件拼接起来;当无人驾驶车辆接收有重复的文件帧号时,需丢弃重复帧号的数据;当无人驾驶车辆接收到文件帧号为0的数据包后,文件传输结束。
22.根据权利要求13所述的方法,其特征在于,在无人驾驶车辆向车载记录设备传输测试数据时,无人驾驶车辆作为主设备负责传输握手包和数据包,车载记录设备作为从设备只回复握手包和ACK包,无人驾驶车辆定时向车载记录设备发送测试数据。
23.根据权利要求22所述的方法,其特征在于,无人驾驶车辆即时发送检测目标的数据,即无人驾驶车辆需分别向车载记录设备发送定时数据格式和即时数据格式两种格式的数据内容。
24.根据权利要求23所述的方法,其特征在于,车载记录设备根据自身时钟对收到的定时数据格式数据包进行时间统计,若无人驾驶车辆在远远小于指定间隔时间内发送数据,则车载记录设备不再进行记录,车载记录设备将对收到的即时数据格式数据包进行时间和内容统计,车载记录设备对于任何数据包编号重复的数据内容不做重复记录。
说明书
技术领域
本发明涉及车辆智能系统领域,具体涉及一种无人驾驶车辆认知能力测试系统及方法。
背景技术
无人驾驶车辆集环境感知、认知、决策规划和驾驶控制等功能于一体,能够自主、安全、可靠地在特定环境下行驶。随着近年来无人驾驶车辆技术的发展,学术界与工业界都需要设计一种测试与评价无人驾驶车辆智能性的方法。
在各研究机构和企业对无人驾驶车辆独立开展研究的基础上,美国、欧洲和中国分别在2004年、2006年和2009年各自开始在统一测试环境、测试内容或评判标准下,有组织地举办无人驾驶车辆赛事。主要的赛事包括:美国DARPA分别于2004年、2005年和2007年举办两届Grand Challenge和一届Urban Challenge;欧洲自2006年至今连续六届组织ELROB比赛;NSFC自2009年至今连续举办了四届中国“智能车未来挑战”赛。
然而,无论是国内外有组织的无人驾驶车辆竞赛,还是谷歌的自动驾驶汽车的自行测试,尽管这些赛事和测试规定了一些相应的测试规则,但是这些规则还都不能够全面、系统、客观地反映无人驾驶车辆的认知能力水平究竟如何;虽然各研究单位也有对各自研发的无人驾驶车辆进行测试而设计的相关环境和方法,但是这些设计都是按照其自身的无人驾驶车辆特点量身定制的,因此这些测试往往是不规范、不系统的。
发明内容
为了全面、系统、客观地测试与评价无人驾驶车辆的认知能力,使经过测试的无人驾驶车辆在城市道路、城际公路和乡村道路上具有基本自主行驶能力,本发明提出一种无人驾驶车辆认知能力测试系统及方法。
根据本发明的一个方面,提出了一种无人驾驶车辆认知能力测试系统,该系统包括无人驾驶车辆和车载记录设备,二者通过通信接口进行有线或者无线连接,其中,车载记录设备用于向无人驾驶车辆输入认知能力测试任务,并接收和存储无人驾驶车辆认知能力测试输出的数据;无人驾驶车辆通过测试任务输入程序接收到测试任务后,重新建立串口连接,开启相应程序输出测试数据到车载记录设备中,无人驾驶车辆认知能力测试的测试任务输入和测试数据输出采用统一接口、参数和数据传输格式,但是数据内容的具体格式不同,其中,测试任务包括基本认知能力测试项目、高级认知能力测试项目和综合认知能力测试项目。。
根据本发明的另一方面,还提出了一种无人驾驶车辆认知能力测试方法,该方法包括步骤:车载记录设备用于向无人驾驶车辆输入认知能力测试任务,并接收和存储无人驾驶车辆认知能力测试输出的数据;无人驾驶车辆通过测试任务输入程序接收到测试任务后,重新建立与车载记录设备的串口连接,开启相应程序输出测试数据到车载记录设备中,无人驾驶车辆认知能力测试的测试任务输入和测试数据输出采用统一接口、参数和数据传输格式,但是数据内容的具体格式不同,其中,测试任务包括基本认知能力测试项目、高级认知能力测试项目和综合认知能力测试项目。。
本发明通过在规范的测试环境中对无人驾驶车辆进行测试和评价,可以验证无人驾驶车辆运行的安全性、可靠性、稳定性和智能性。
附图说明
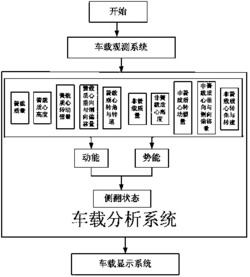
图1为本发明无人驾驶车辆认知能力测试系统及方法总体框图;
图2为I-测试方案示意图;
图3为M-测试的方案;
图4为M-测试场景举例示意图;
图5为车道保持行车轨迹示意图;
图6为交叉路口停车线停车示意图;
图7为变更车道示意图;
图8为通过路口示意图;
图9为执行U-Turn转弯示意图;
图10为本发明车载记录设备的硬件结构图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本发明进一步详细说明。
本发明的无人驾驶车辆认知能力测试系统由一整套软硬件平台组成,它通过与无人驾驶车辆进行有线或无线的连接获取其认知信息,从而实现对无人驾驶车辆认知能力的测试。
图1为无人驾驶车辆认知能力测试系统的总体框图。
由于经过测试的无人驾驶车辆应该在城市道路、城际公路和乡村道路上具有基本自主行驶能力,因此,本发明从道路系统的四要素(人、车、路与交通信号)出发,并假设在道路以外的,不影响无人驾驶车辆行驶的行人、物体、行道树和建筑物等不在本发明的考虑范围之内。
在上述假设和分析的基础上,本发明的测试项目包括基本认知能力测试项目、高级认知能力测试项目和综合认知能力测试项目。
1)基本认知能力测试项目
对交通信号、行驶灯语和笛声(下面以“视听觉信息”概括之)的认知能力是无人驾驶车辆上路行驶必须具备的基本认知能力,因此该项目主要测试无人驾驶车辆认知交通信号以及行驶灯语和笛声的能力。该部分测试内容属于静态测试,根据难易程度的不同分为B-测试和I-测试两种形式。
B-测试是指被测车辆处于静止状态,识别标准的视听觉信息,要求无人驾驶车辆输出代表相应视听觉信息的图像、文字、符号或声音,主要的考查指标为正确识别视听觉信息的个数以及识别所需的时间。标准的视听觉信息包括如下内容:
交通信号包括交通标志、交通标线、交通信号灯和交通警察的指挥,见国标GB5768-2009和GB14887-2003。
交通标志分为主标志和辅助标志两大类。国家标准GB5768-2009《道路交通标志和标线》适用于公路、城市道路和虽在单位管辖范围但允许社会机动车通行的地方,包括广场、公共停车场等用于公众通行的场所等各类道路上设置的交通标志和标线。其它机动车通行的地方、停车场等设置的交通标志和标线可参照执行。主标志包括:①警告标志(54种);②禁令标志(48种);③指示标志(39种);④指路标志(87种);⑤旅游区标志(17种);⑥作业区标志(用于作业区的标志为警告标志、禁令标志、指示标志及指路标志);⑦告示标志(8种)。禁令标志和指示标志为道路使用者必须遵守的标志;其它标志仅提供信息,如指路标志、旅游区标志。辅助标志(19种)是附设在主标志下,对其进行辅助说明的标志。
交通标线是由施划或安装于道路上的各种线条、箭头、文字、图案及立面标记、实体标记、突起路标和轮廓标等所构成的交通设施。交通标线按功能分为以下三类:1)指示标线(35种);2)禁止标线(21种);3)警告标线(9种)。
交通信号灯按功能可分为机动车信号灯、非机动车信号灯、人行横道信号灯、车道信号灯、方向指示信号灯、闪光警告信号灯、道口信号灯。有的道路交通信号灯可能会配有倒计时数码显示器。无人驾驶车辆对交通信号灯的认知可能会受到信号灯的排列顺序和安装位置的影响,本发明采用的交通信号灯的排列顺序和安装位置的信息请见国家标准GB14886-2006《道路交通信号灯设置与安装规范》,该标准适用于城市道路和公路平面交叉口(以下简称路口)、城市道路和公路路段(以下简称路段)、城市道路和公路与铁路平面交叉口(以下简称道口)处信号灯的安装。国家标准GB14887-2003《道路交通信号灯》适用于在道路上使用的信号灯。路口按形状主要可分为:十字形、斜交、T形、Y形、错位T形、错位Y形、多路和环形路口。
交通警察的指挥包括交警手势(11种)。
行驶灯语是指车辆在参与交通过程中使用的灯光,行车中经常使用的灯光主要包括转向灯、前照灯、后位灯、示廓灯、制动灯等。笛声是指车辆在参与交通过程中喇叭或特种车辆上的警报器发出的声音,这里所说的特种车辆主要包括警车、消防车、救护车和工程救险车等。
I-测试是指被测车辆处于静止状态,在以下三种情况下:①对不标准的视听觉信息的认知(标准的视听觉信息受到阴影、污损、遮挡、倾斜、模糊—风吹日晒后的褪色、光照、变形等干扰因素的影响);②在具有特征绑定的条件下对相应视听觉信息目标的提取和认知;③在多元信息条件下所需视听觉信息目标的提取和认知,要求无人驾驶车辆输出代表相应视听觉信息的图象、文字、符号或声音。I测试主要的考查指标为正确识别视听觉信息的个数以及识别所需的时间,测试方案示意图如图2所示。
2)高级认知能力测试
该项测试内容属于动态测试,是在基本认知能力测试的基础上、无人驾驶车辆和被测视听觉信息处于相对的运动状态下,测试无人驾驶车辆在一定的交通场景中对交通环境和交通行为的认知能力,简称M-测试。
该部分测试内容是在较短的距离里面对一个或几个交通场景和交通现象进行测试,主要的考查指标为识别视听觉信息的个数以及识别所需时间、指定任务的完成情况(包括认知目标、速度、位置、时间、行为等)。
M-测试具体可分为两大类:视听觉信息动而无人驾驶车辆不动和视听觉信息不动而无人驾驶车辆动。此处的视听觉信息动主要指视听觉信息源(或目标源)远近位置(纵向)变动较大,而左右位置(横向)变动相对较小的情况(这与实际道路情况比较相符,车辆距离视听觉信息源总是由远及近或由近及远,即纵向变化较大,而受道路宽度和设置位置的限制,横向变化相对较小);无人驾驶车辆动是指无人驾驶车辆处于行驶状态。M测试方案示意图如图3所示。
这里的交通场景包括交叉口、环岛、城市快速路匝道、高速路匝道、泊车区域、隧道、立交桥、高架桥、急转弯道路、上坡路、下坡路、具有横向倾斜角度的道路等;具体的交通现象包括转向、换道、超车、会车、倒车、掉头、汇车、泊车、交叉口通行、立交桥通行、铁道口通行、立交桥和铁路桥桥底通行、紧急制动、行人避让、货物散落、道路上静止障碍物等。
3)综合认知能力测试
该项测试内容属于动态测试,在基本认知能力和高级认知能力测试的基础上,主要测试无人驾驶车辆对交通场景的综合认知能力以及自主驾驶和智能导航的能力,简称S-测试。
S-测试相对复杂,主要分为面向城市道路环境、城际公路环境、乡村道路环境以及三者结合的道路环境,在一定长的距离内,无人驾驶车辆需要识别障碍物、交通信号、行驶灯语、笛声、交通基础设施和交通现象等,并按照要求完成自主驾驶和智能导航,主要的考查指标为识别视听觉信息的个数以及识别所需时间、指定任务的完成情况(包括认知目标、速度、位置、时间、行为等)。例如:在城际高速公路和城区道路等正常交通流中,要求无人驾驶车辆能够与有人驾驶车辆以及无人驾驶车群之间,基于视听觉信息(交通信号、行车灯语和笛声)进行多车交互及无人驾驶车辆协同驾驶,实现多辆无人驾驶车混迹于正常城际交通流中行驶;在城区较大范围内和复杂交通流条件下,要求无人驾驶车辆能够自主行驶,包括在遵守交通法规前提下和在可控的真实行车环境中实现基本交通标志的检测与识别,不同交通环境中的车速控制、车道保持、动态超车、静动态障碍物避让以及规定区域的自主停车,并在可控的多种城区道路(密集道路,城市环路,绕城公路等)环境下实现自主驾驶。
为了通过上述的测试项目达到对无人驾驶车辆的认知能力测试的目的,本发明的测试场景不是场景与传感、测量、计算设备的简单组合,而是针对静态、动态和不确定性环境下完成测试任务的复杂测试场景。本发明构建了一个交通环境和交通现象的最小集合为:交通场景包括交叉口、环岛、城市快速路匝道、高速路匝道、泊车区域、隧道、立交桥、高架桥、急转弯道路、上坡路、下坡路、具有横向倾斜角度的道路等;交通现象包括转向、换道、超车、会车、倒车、掉头、汇车、泊车、交叉口通行、立交桥通行、道口通行、立交桥和铁路桥桥底通行、停止线停车、紧急制动、行人避让、货物散落、道路上静止障碍物等。
【测试场景设计说明】
本发明无人驾驶车辆认知测试标准体系由基本认知能力测试、高级认知能力测试和综合认知能力测试组成,共涉及到四项测试内容,由易到难、由简到繁、由低到高依次为:B-测试、I-测试、M-测试和S-测试,前两项属于静态测试,后两项属于动态测试。为了更详细说明本发明在具体的测试场景设计方面的内容,下面分别对四项测试内容分别进行具体的说明。
B-测试和I-测试场景:对于静态测试而言,由于被测试的无人驾驶车辆处于静止状态,所以相应的测试场景相对比较简单,可以根据实际所测内容的需要,任意选取相对宽阔的空间即可,也可根据动态测试所选定的测试场景而确定。
M-测试和S-测试场景:对于动态测试而言,由于被测试的无人驾驶车辆处于行驶状态,一方面处于安全的考虑;另一方面技术进步是一个循序渐进的过程,在还没有专门的测试场地之前,建议尽可能地选取相对封闭的真实的道路环境(比如驾校测试场),或者是已建成的尚未通车或者已建成的交通流量非常小的城市道路、城际公路或乡村道路环境为较适宜,然后在此基础上,根据实际测试内容进行选取、设计相应的满足M-测试和S-测试需要的交通环境。下面对M-测试和S-测试进行举例说明。
M-测试举例:
在如图4所示的一个十字路口及其周边道路,无人驾驶车辆在沿路行驶的过程中必须识别路边交通标志的信息,并根据号码所绑定的交通指示标志的指示进入相应的车道,并按照交通信号灯的指示,遵守交通规则,平稳通过路口。
注:本例中所考核的基本认知能力测试方面的认知内容包括:交通标志、特征绑定、交通信号灯、交通标线和十字路口;所考核到的高级认知能力测试方面的内容:保持车道行驶、换道、停止线停车、通过路口。
就本例而言,还可以通过设置标志是否受到干扰因素的影响,路上有无障碍物,是否在路口增加行人过街标线,是否有行人通过,道路上是否有其它有人驾驶或无人驾驶的车辆,车辆的密集程度如何,无人驾驶车辆的视野中是否会出现多元信息等等,来设计和增加测试的内容和难度。
S-测试举例:
在整个测试过程中,要求无人驾驶车辆按照道路上的交通标志指示进行行驶,在完成赛程的过程中必须执行以下操作:车道保持行驶、停止线停车、变更车道、通过路口、U-turn等。具体测试要求如下:
①车道保持行驶:无人驾驶车辆在结构化道路上行驶,除了在执行转弯、超车、避障、U-Turn等动作外,无人车辆不能离开车道,应该保持在车道内行驶。交叉口的转弯曲线应该是连接两个路段的圆滑曲线,图5为无人驾驶车辆在左转通过交叉口时保持车道的行车轨迹示意图。
②停止线停车:要求无人驾驶车辆能够识别停车线并执行停车。无人驾驶车辆在行驶过程中,遇到设有停车标志或停止线时,应停在距离停止线一米以内的地方(如图6所示)。无人驾驶车辆不能在交叉路口越过停止线停车。
③变更车道:在发现前方有移动物体时,要求无人驾驶车辆在距离前方移动物体一定距离的范围内改变车道(如图7所示)。
④通过路口:通过路口时,须按交通信号灯的指示行驶;遇有路口交通阻塞时不得进入路口;左转通过路口时,须靠路口中心点左侧转弯(如图8所示)。
⑤U-Turn:无人驾驶车辆在执行U-Turn时应符合交通法规,不得妨碍正常行驶的其它车辆和行人通行(如图9所示)。
【通信接口和通信协议设计说明】为了给无人驾驶车辆提供其所能识别的测试任务,必须向无人驾驶车辆输入它能识别的任务文件,本发明的通信接口和通信协议规定了传输设备向无人驾驶车辆传输测试任务的方式和格式。同时,为了准确地评价无人驾驶车辆的认知能力,量化评价指标,做到有据可查,保证测试的“公平、公正、公开”,本发明必须具备有效的记录设备,实时地采集和存储无人驾驶车辆的状态和对目标的认知结果。基于上述考虑,本发明设计了车载记录设备,该设备具有传输设备和记录设备的功能:向无人驾驶车辆输入认知能力测试任务;接收和存储无人驾驶车辆认知能力测试输出的数据。
无人驾驶车辆认知能力测试的测试任务输入程序和测试数据输出程序是两套独立的程序。无人驾驶车辆通过测试任务输入程序接收到测试任务后,应重新建立串口连接,开启相应程序输出测试数据到车载记录设备中。考虑到程序易用性,无人驾驶车辆认知能力测试的测试任务输入和测试数据输出可采用统一接口、参数和数据传输格式,但是在数据内容的具体格式上有区分。
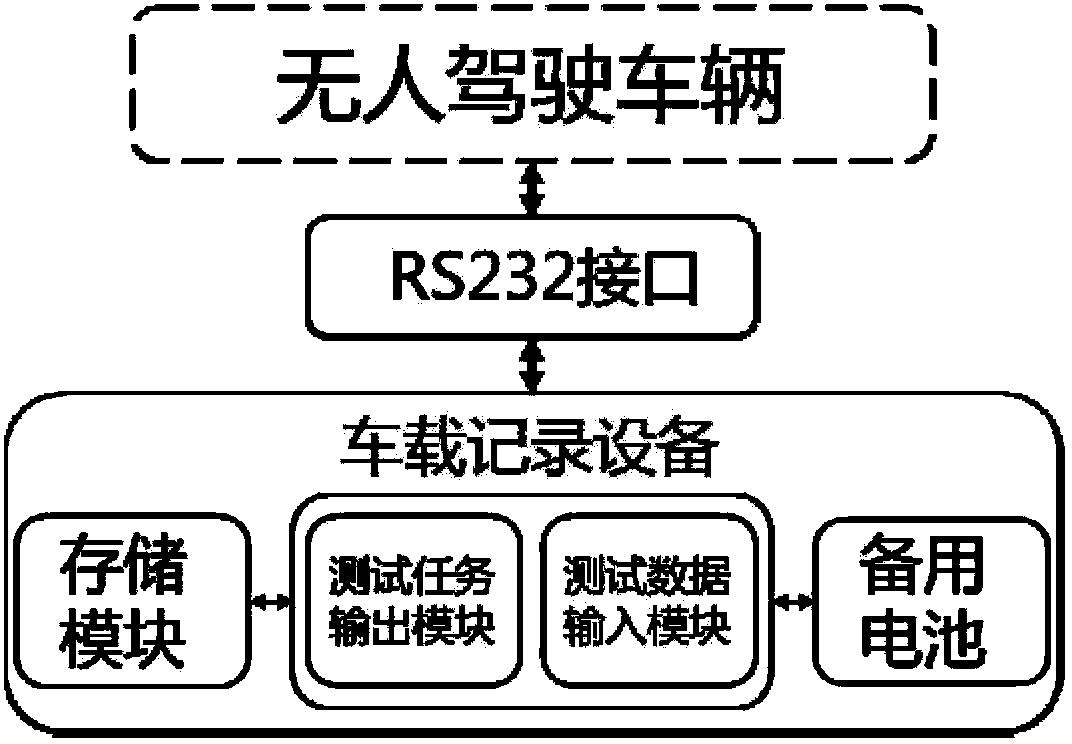
为保障无人驾驶车辆与车载记录设备通信的可靠性,考虑到通信所需数据量的大小和车辆设备种类繁多、接口不一等因素,本发明采用通用性较强的RS-232接口进行信息的传送。无人驾驶车辆需具备置于车内便于接插的DB9串口公接头,并预留必要的空间位置放置车载记录设备。车载记录设备端使用自有电源,提供DB9串口母接头,其硬件结构图如图10所示。
参照图10,车载记录设备进一步包括存储模块、备用电池、测试任务输出模块和测试数据输入模块。为保证车载记录设备的工作时间,设置了备用电池模块,该模块可以在当前使用电池的电量低于一定值时,自动切换到备用电池。车载记录设备开始工作后,首先经测试任务输出模块将存储在设备中的任务发送给无人驾驶车辆,之后由测试数据输入模块接管,等待无人驾驶车辆发回的测试结果,并将结果保存到存储模块中。
为了与无人驾驶车辆通信,必须建立有效的通信协议。在整个通信系统中,车载记录设备作为主设备负责传输握手包和数据包;而无人驾驶车辆作为从设备只回复握手包和ACK包。通信接口设备的接口优选采用RS-232,通过有线方式进行连接。
车载记录设备和无人驾驶车辆之间的通信需要符合以下要求:
通信参数:波特率9600bps,8个数据位,1个停止位,无奇偶校验。
通信格式:
包类型:包类型包括握手包、ACK包和数据包。
握手包格式:
请求方向:
0:表示无人驾驶车辆请求向车载记录设备发送数据;
1:表示车载记录设备请求向无人驾驶车辆发送数据。
收发状态:
0:表示未准备好接收或传送数据;
1:表示准备好接收或传送数据。
ACK包格式:
ACK状态:
0:表示接收端接收到的数据有误;
1:表示正确接收端接收到数据。
注:若发送端(车载记录设备)发送数据100ms后未接收到接收端(无人驾驶车辆)ACK包,则重发数据。
数据包格式:
数据内容格式:
注:当一个文件开始传送前,车载记录设备会根据文件的大小,计算出当前数据包的文件帧号,将按倒序添加到每个数据包的文件帧号中。当无人驾驶车辆接收到一个数据包后,应检查数据内容中的文件帧号,将分包传送的文件拼接起来;当无人驾驶车辆接收有重复的文件帧号时,需丢弃重复帧号的数据;当无人驾驶车辆接收到文件帧号为0的数据包后,文件传输结束。
无人驾驶车辆认知能力测试任务输入举例:
①连接串口,裁判方通过车载记录设备向无人驾驶车辆发送握手包,置收发状态位为1,请求方向为1,请求传送任务文件;
②若无人驾驶车辆未准备好接收数据,则回复握手包,置收发状态位为0,请求方向为1”;
③车载记录设备在100ms内检查是否收到握手包,若超过100ms仍未收到则重发握手包,直到收到无人驾驶车辆回复握手包表示准备好;
④车载记录设备收到握手包后,开始发送第一个数据包;
⑤无人驾驶车辆接收到数据包后,检查校验码,若校验码不正确,则回复ACK为0,表示请求重发;
⑥若校验码无误,则无人驾驶车辆首先检查数据内容中的文件帧号,当文件帧号为0,则表示文件传输结束,然后无人驾驶车辆回复ACK为1,表示确认收到。否则转存当前包数据,清空buffer准备接收下一个数据包,回复ACK为1;
⑦若车载记录设备收到ACK为0,则重发数据包;
⑧若车载记录设备在100ms内没有收到任何ACK包,则重发该数据包,直到收到无人驾驶车辆回复的ACK为1;
⑨车载记录设备收到无人驾驶车辆回复的ACK为1,则发送下一个数据包;
⑩无人驾驶车辆继续检查数据内容的文件帧号,当文件帧号为0,则文件传输结束。
无人驾驶车辆认知能力测试的输出数据接口与通信协议,本协议规定了无人驾驶车辆向车载记录设备传输测试数据的方式和格式。无人驾驶车辆作为主设备负责传输握手包和数据包,车载记录设备作为从设备只回复握手包和ACK包。为了全程记录无人驾驶车辆的位置信息,无人驾驶车辆需定时向车载记录设备发送测试数据;同时为了第一时间核对无人驾驶车辆检测目标的结果,无人驾驶车辆需即时发送检测目标的数据,即无人驾驶车辆需分别向车载记录设备发送定时数据格式和即时数据格式两种格式的数据内容。
车载记录设备根据自身时钟对收到的定时数据格式数据包进行时间统计,若无人驾驶车辆在远远小于指定间隔时间内发送数据,则车载记录设备不再进行记录。故无人驾驶车辆应避免短时间内大量发送数据包。车载记录设备将对收到的即时数据格式数据包进行时间和内容统计,详见即时数据格式。车载记录设备对于任何数据包编号重复的数据内容不做重复记录。
通信接口:RS-232,有线连接。
通信参数:波特率9600bps,8个数据位,1个停止位,无奇偶校验。
通信格式:
包类型:包类型包括握手包、ACK包和数据包。
握手包格式:
请求方向:
0:表示无人驾驶车辆请求向车载记录设备发送数据;
1:表示车载记录设备请求向无人驾驶车辆发送数据。
收发状态:
0:表示未准备好接收或传送数据;
1:表示准备好接收或传送数据。
ACK包格式:
ACK状态:
0:表示接收端接收到的数据有误;
1:表示正确接收端接收到数据。
注:若发送端(无人驾驶车辆)发送数据100ms后未接收到接收端(车载记录设备)ACK包,则重发数据。
数据包格式:
数据内容格式:数据内容格式分为定时数据和即时数据格式,以数据包编号区分。
注:该数据内容格式中的关键字长度及关键字的表示方法可根据具体需要而定。
定时数据格式:定时数据格式的内容为无人驾驶车辆定时发送的位置和时间信息。
即时数据格式:即时数据格式的内容为无人驾驶车辆发送的目标检测的实时信息。
数据包编号:是每个数据包的唯一编号。在定时数据格式中,以T的ASCII码开头;在即时数据格式中,以R的ASCII码开头。
车辆编号:比赛开始前分配给车队的唯一代号。
时间:数据发送时的时间信息。
地点:数据发送时无人驾驶车辆的位置信息。
目标信息:无人驾驶车辆检测到的目标信息。目标信息格式如下:
目标代码:包括类型代码及其相应的编号。
注:为避免车载记录设备通信堵塞和存储溢出,车载记录设备在一定时间内(如1秒)对于记录数据包编号重复或目标代码重复的即时数据格式的数据包,仅以第一次接收到的信息为准,对反复发送的部分不再接收、不再存储,即无人驾驶车辆检测到待测目标后,应只发送一次关于该目标的数据。
目标状态:表示被测目标的速度信息。
无人驾驶车辆认知能力测试数据输出举例:
①连接串口,无人驾驶车辆向车载记录设备发送握手包,置收发状态位为1,请求方向0,请求传送测试数据。
②若车载记录设备未准备好接收数据,则回复握手包,置收发状态位为0,请求方向0”。
③无人驾驶车辆在100ms内检查是否收到握手包,若超过100ms仍未收到则重发握手包。直到收到车载记录设备回复握手包表示准备好。
④无人驾驶车辆收到握手包后,开始发送第一个数据包。
⑤车载记录设备接收到数据包后,若校验码不正确,则回复ACK为0,表示请求重传。
⑥若校验码无误,车载记录设备回复ACK为1,表示确认收到。
⑦若无人驾驶车辆收到ACK为0,则重传数据包。
⑧若无人驾驶车辆在100ms内没有收到任何ACK包,则重发该数据包。直到收到车载记录设备回复的ACK为1。
⑨无人驾驶车辆收到车载记录设备回复的ACK为1后,再发送下一个数据包。
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
一种无人驾驶车辆认知能力测试系统及方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0