






专利摘要
本发明公开一种燃料组件转运机,包括驱动机构、中间减速器(3)、旋转柱(4)、连接框架(5)、传动轴、导向柱(8)、齿条(30)、抓手等,其特征在于,驱动机构通过中间加速器(3)与旋转柱(4)连接,旋转柱(4)通过连接框架(5)、传动轴与导向柱(8)连成一体,导向柱(8)内设有齿条(30)和抓手。该装置能够自锁,定位精度高、可靠性好、易于维护、可适用于远距离操作。
权利要求
1.一种燃料组件转运机,包括驱动机构、中间减速器(3)、旋转柱(4)、连接框架(5)、传动轴、导向柱(8)、齿条(30)、抓手等,其特征在于,驱动机构通过中间加速器(3)与旋转柱(4)连接,旋转柱(4)通过连接框架(5)、传动轴与导向柱(8)连成一体,导向柱(8)内设有齿条(30)和抓手。
2.根据权利要求1所述的一种燃料组件转运机,其特征在于,所述的抓手的结构为位于齿条(30)内部的管(46)及管(46)内的缓冲弹簧(43),杆(48)的上端穿入管(46)的下部,杆(48)的下端通过螺纹连接到过渡件(98)上,销轴(49)将过渡件(98)和连接件(99)连接在一起,连接件(99)下部连接有杆(50),杆(50)中部的凸起被限制在塞子(51)和鞍座(52)之间,爪(53)通过销轴(66)连接到塞子(51)上,杆弹簧(55)的上部固定在杆(50)下部的孔中,杆弹簧(55)的下部穿入叉形件(58)上部的孔中,抓爪(59)固定在叉形件(58)上。
3.根据权利要求2所述的一种燃料组件转运机,其特征在于,所述的杆(50)中部凸起的上表面为外球面,塞子(51)的下部为内球面,塞子(51)的中间孔是锥孔。
4.根据权利要求2所述的一种燃料组件转运机,其特征在于,所述的杆(50)中部凸起的下表面为内球面,鞍座(52)的内部凸起为外球面。
5.根据权利要求2所述的一种燃料组件转运机,其特征在于,所述的爪(53)为三个沿圆周方向均布,爪(53)上的轴(90)套有小弹簧(54),小弹簧(54)嵌入爪(53)上的孔内,轴(90)的下部为球面。
6.根据权利要求1至5任一项所述的一种燃料组件转运机,其特征在于,所述的齿条(30)上安装传感器(41),齿条(30)上连接有端部设置有磁体(88)的信号杆(87)。
说明书
技术领域技术领域
本发明涉及反应堆工程技术领域,具体涉及一种燃料组件转运机。
技术背景背景技术
在反应堆中,有许多对新、乏燃料的操作过程,多数操作环境都具有强的放射性,而且有的组件离操作平台较远,一般燃料抓具的长度不能满足距离的要求。目前所知的一些抓具,结构复杂而且需要引入配重来平衡才能完成抓取的操作。
发明内容发明内容
本发明克服了现有技术中的不足,提供了一种能够自锁的、可靠性好、远距离操作的燃料组件转运机。
为了解决上述技术问题,本发明是通过以下技术方案实现的:
一种燃料组件转运机,包括驱动机构、中间减速器、旋转柱、连接框架、传动轴、导向柱、齿条、抓手等,关键在于,驱动机构通过中间加速器与旋转柱连接,旋转柱通过连接框架、传动轴与导向柱连成一体,导向柱内设有齿条和抓手。
与现有技术相比,本发明的有益效果是:该装置通过传动轴与齿条、抓手的配合,抓手、齿条和导向柱的传动各自独立,在不需要引入配重的情况下即可完成抓取操作,定位精度高,操作安全可靠。
附图说明附图说明
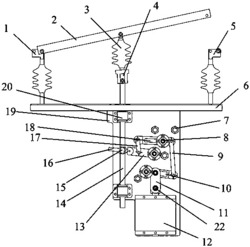
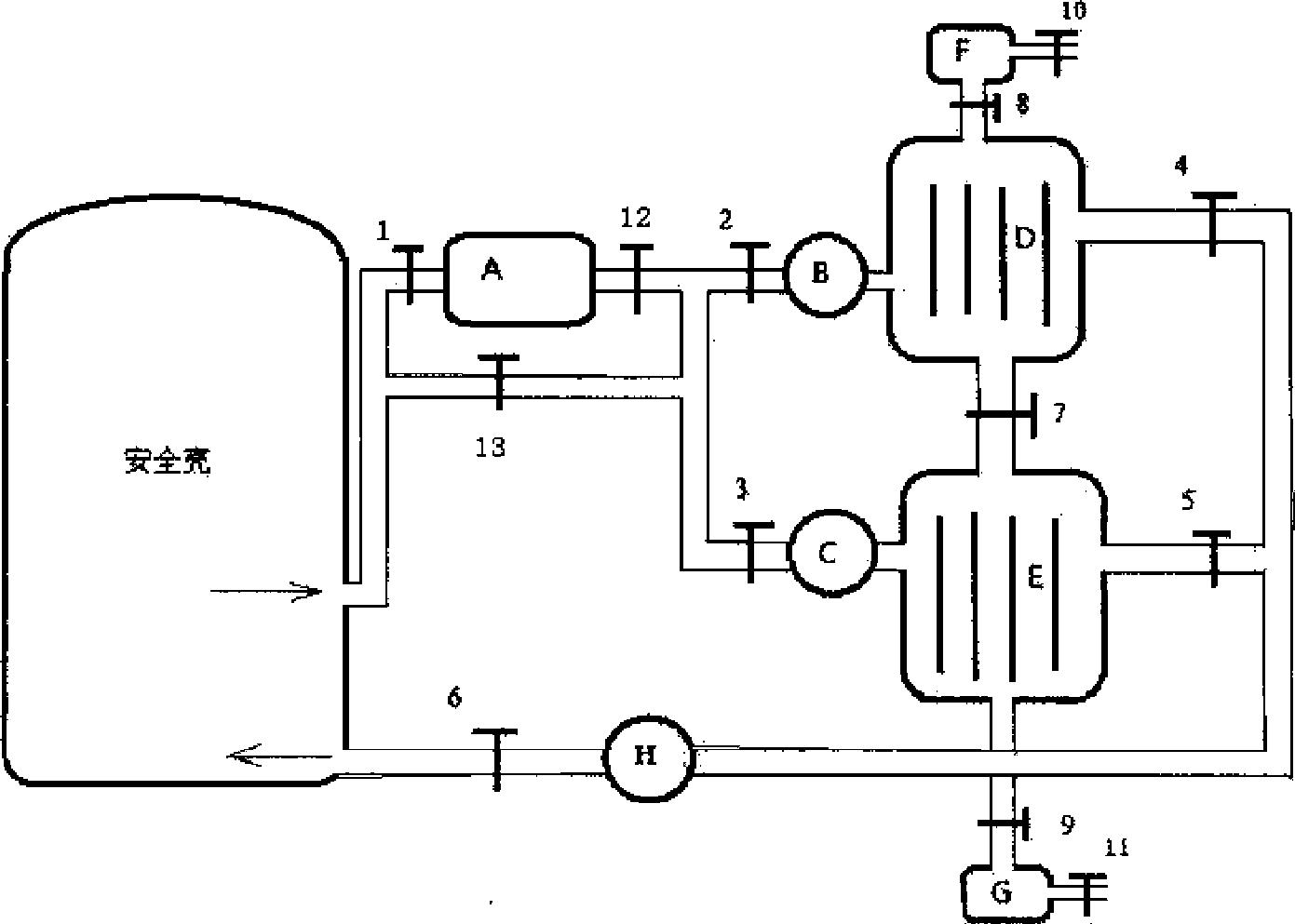
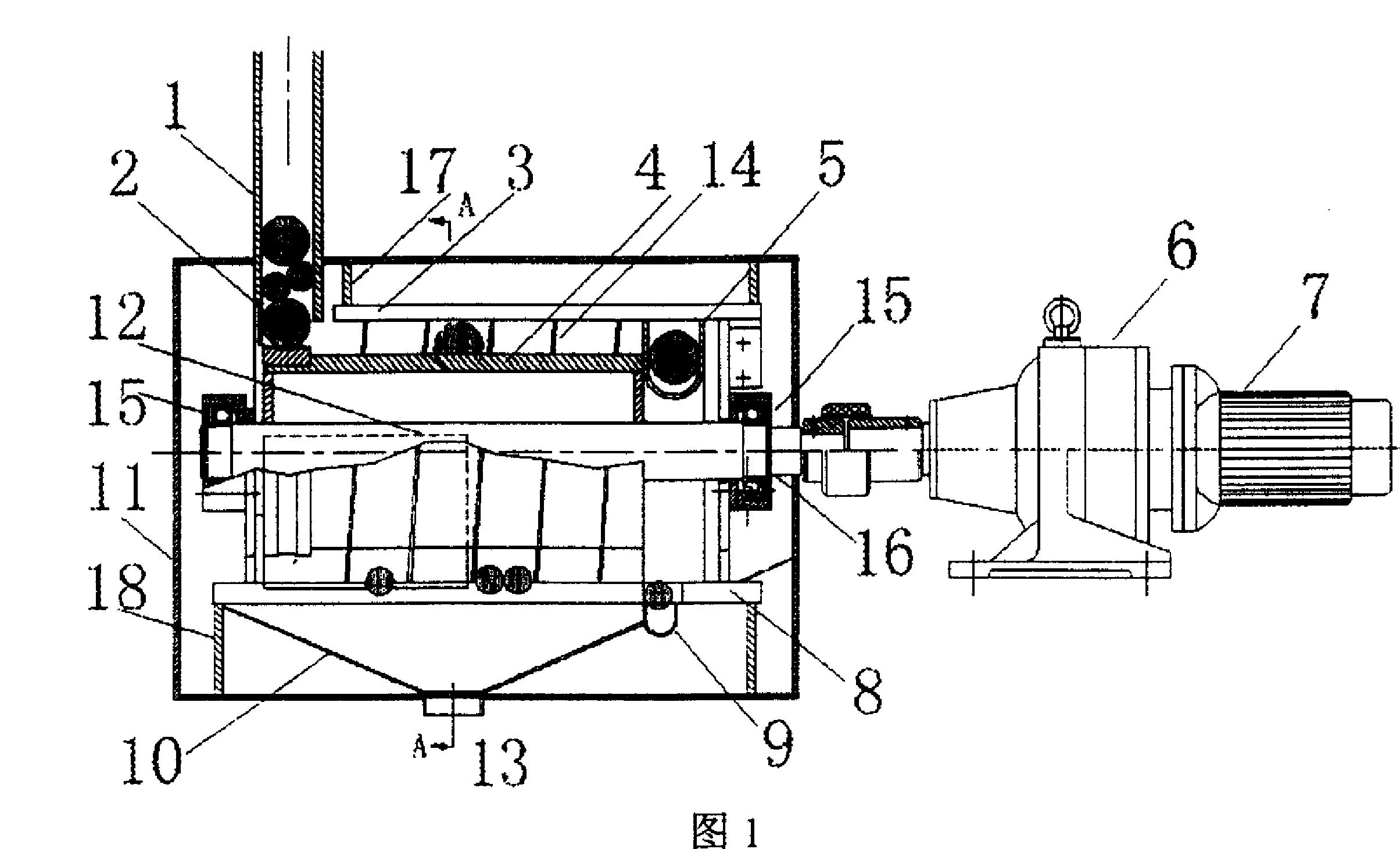
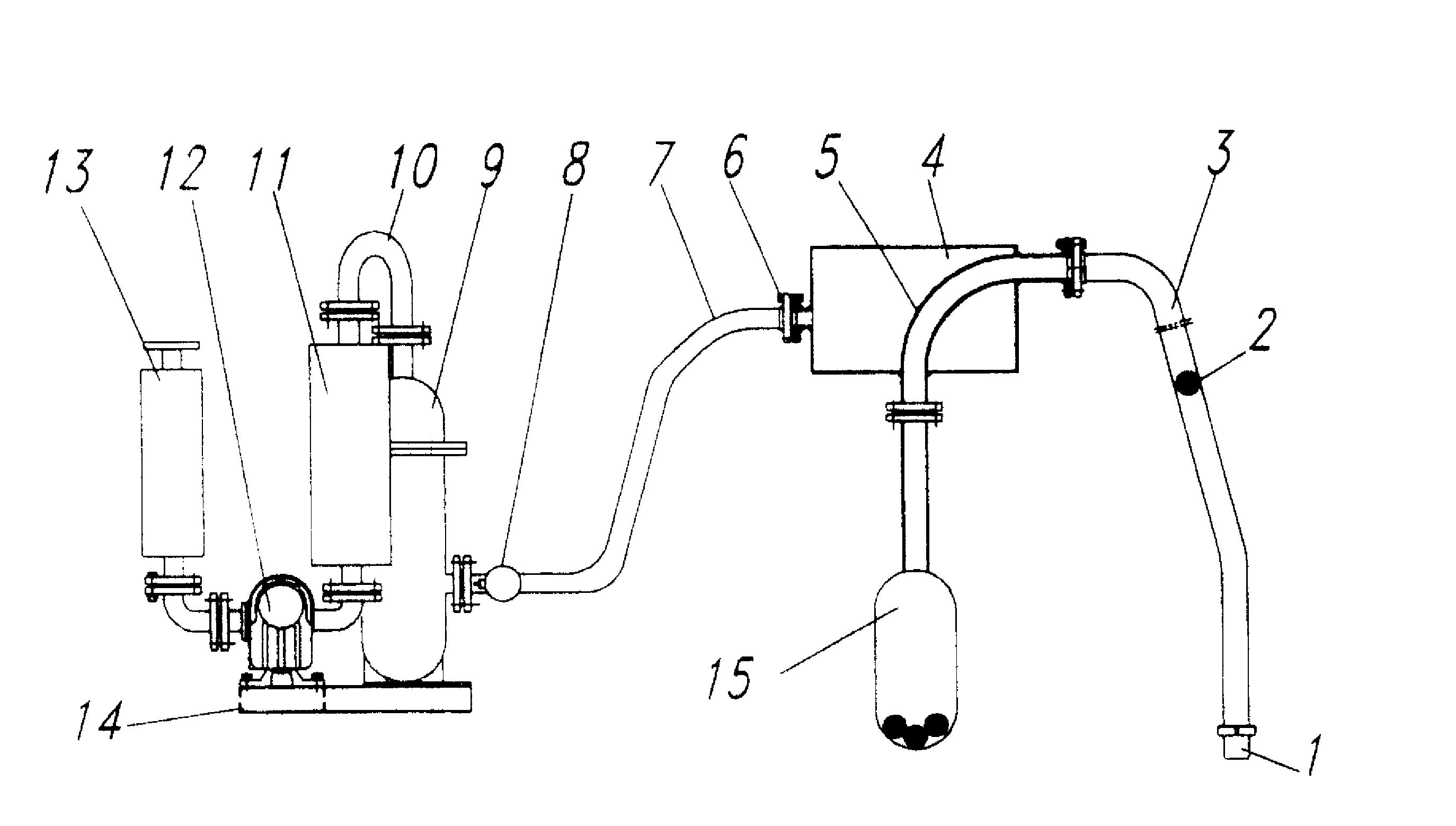
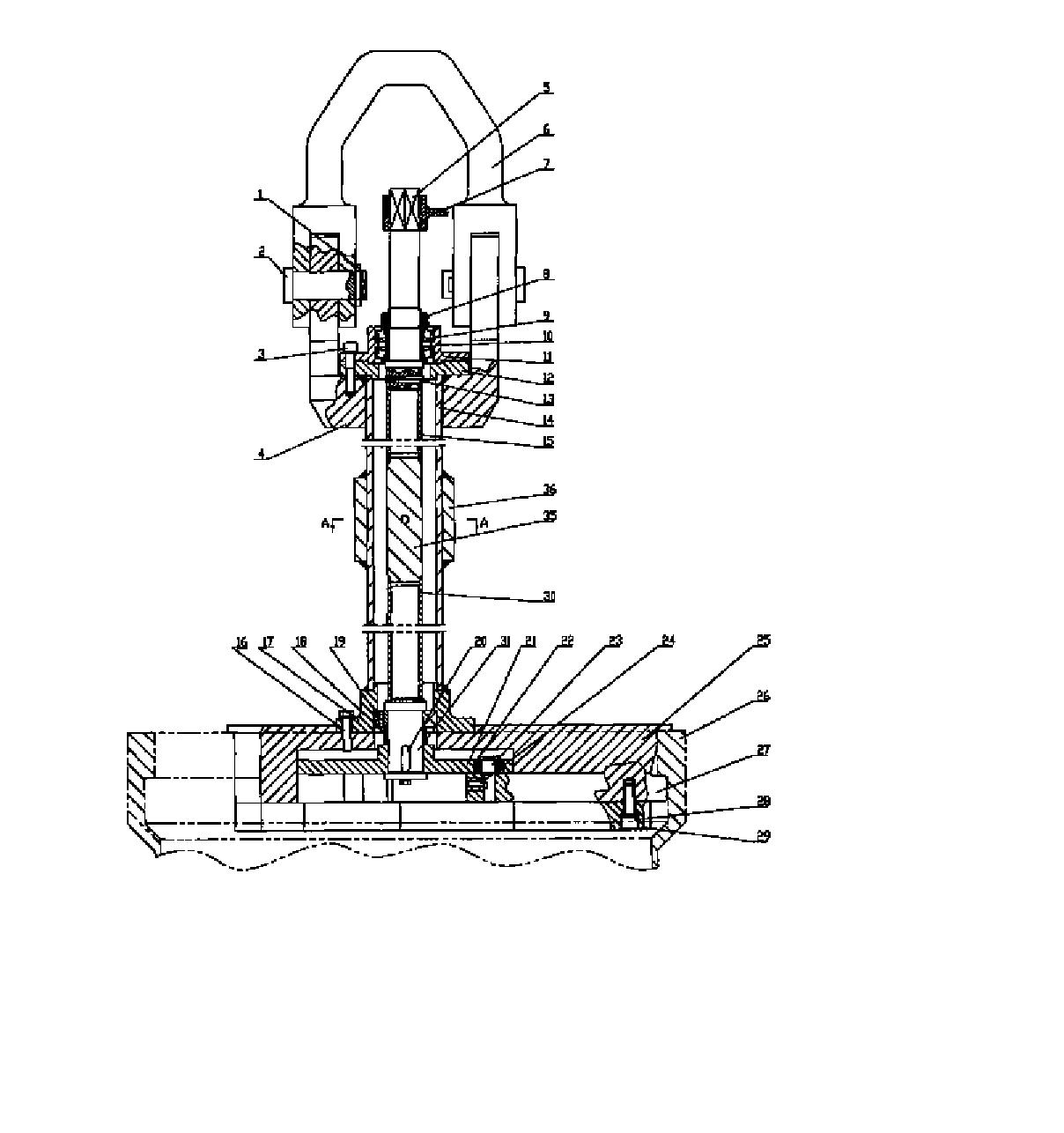
图1装置的总体结构示意图
图2传动原理图
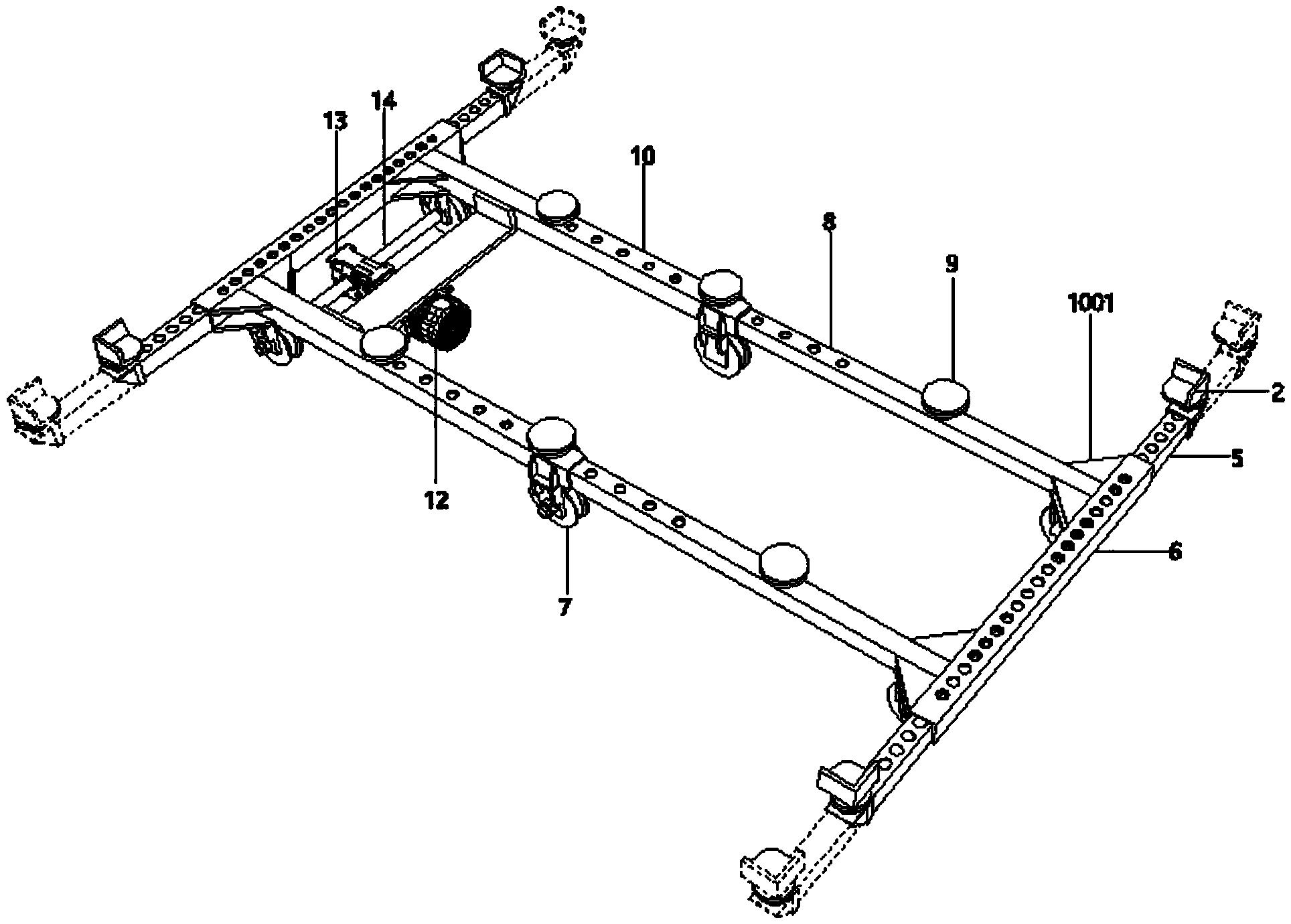
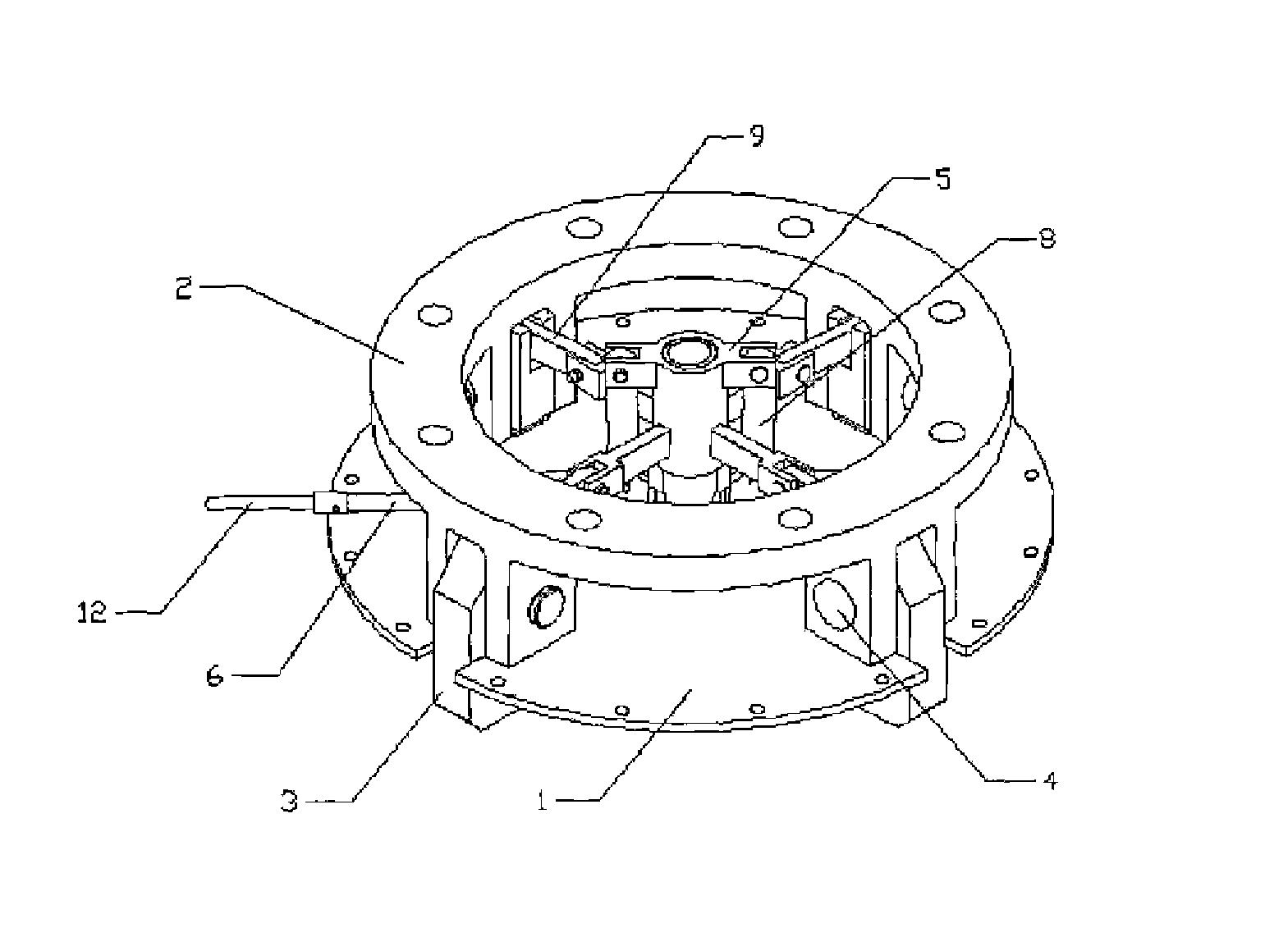
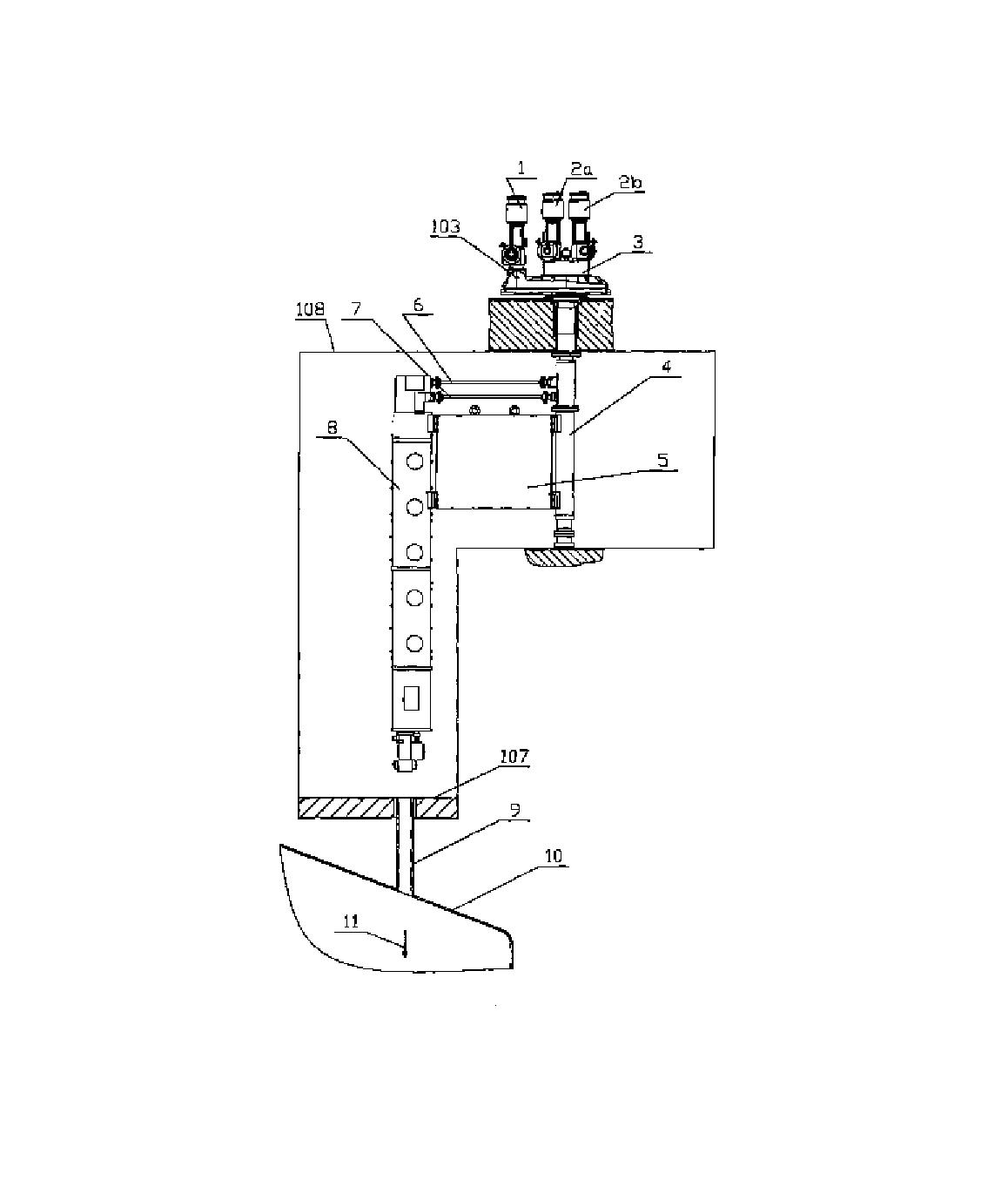
图3装置的立体结构示意图
图4如图3所示A向局部剖视图
图5图3所示的后面视图
图6链轮传动的简图
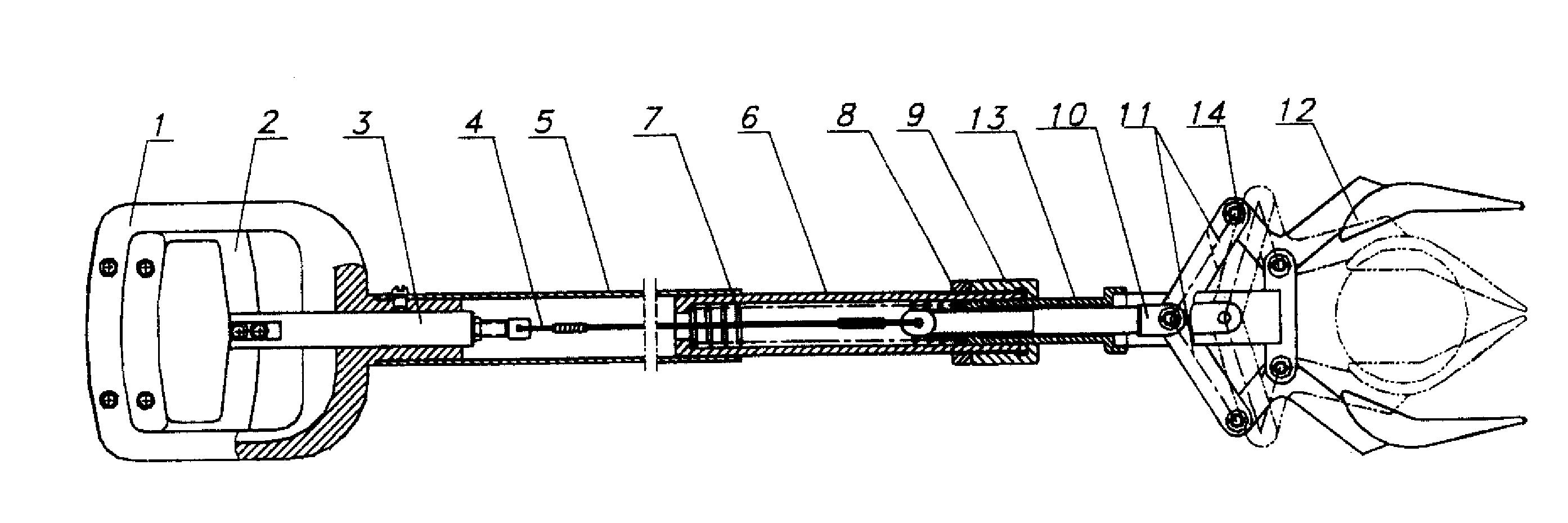
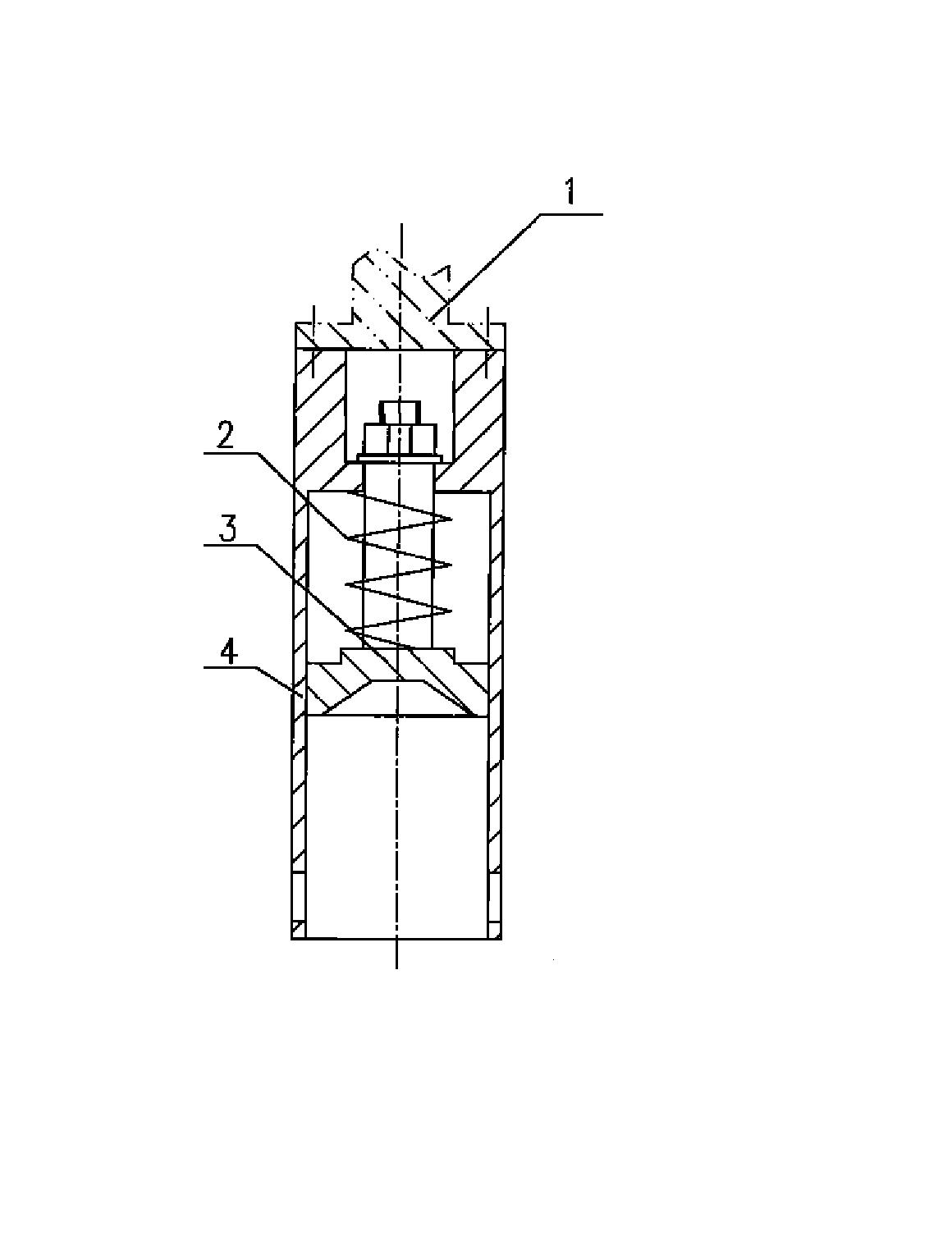
图7抓手的剖视图
图8如图7所示的G1-G1剖视图
图9如图7所示的G2-G2剖视图
图10如图7所示的G3-G3剖视图
图11如图7所示的L-L剖视图
图12如图1所示的G4-G4剖视图
图13三个抓爪并在一起的状态图
1导向柱驱动机构、2a抓手驱动机构、2b齿条驱动机构、3中间减速器、4旋转柱、5连接框架、6齿条水平传动轴、7抓手水平传动轴、8导向柱、9接管、10反应堆主容器、11燃料组件、12a联轴器、12b联轴器、12c联轴器、12d联轴器、13伞齿轮、14伞齿轮、15轨道、16滚轮、17支撑架、18齿轮、19齿轮、20链轮、21蜗杆、22蜗轮、23抓手驱动轴、24联轴器、25轴支撑、26蜗杆、27传动箱体、28蜗轮、29齿轮、30齿条、31吊装头、32吊装头、33箱体、34伞齿轮、35伞齿轮、36齿条驱动轴、37吊装头、38限位键、39法兰、40撞块、41传感器、42弹簧、43缓冲弹簧、44轴、45链节、46管、47螺母、48杆、49销轴、50杆、51塞子、52鞍座、53爪、54小弹簧、55杆弹簧、56弹簧、57弹簧、58叉形件、59抓爪、60长槽、61长圆孔、62长孔、63信号杆、64短杆、65管、66销轴、67挡圈、68销、69滚轮、70滚轮、71齿轮、72齿轮、73齿轮、74齿轮、75齿轮、76齿轮、77伞齿轮、78伞齿轮、79伞齿轮、80伞齿轮、81轴承、82轴承、83短轴、84箱体、85连轴器、86短轴、87信号杆、88磁体、89管、90轴、91销轴、92外锥面、93内锥面、94销、95销、96短管、97销、98过渡件、99连接件、100销、101锥面、102锥面、103联轴器、104联轴器、105联轴器、106斜面、107地面、108密封的房间
具体实施方式具体实施方式
下面结合附图与具体实施方式对本发明作进一步详细描述:
本装置安装在一个严格密封的房间108内,驱动机构优选为三个独立的驱动机构,分别为导向柱驱动机构1、抓手驱动机构2a、齿条驱动机构2b,传动轴为齿条水平传动轴6、抓手水平传动轴7。该转运机主要由导向柱驱动机构1、抓手、齿条驱动机构2a、2b、中间减速器3、旋转柱4、连接框架5、齿条水平传动轴6、抓手水平传动轴7、导向柱8、齿条30、抓爪59等组成。抓手驱动机构2a用于驱动抓手,齿条驱动机构2b用于驱动齿条30。图7中位于齿条30内部的和撞块40相连接的位于撞块40以下的所有的组成部分构成本装置的抓手,即位于齿条30内部的管46及管46内的缓冲弹簧43,杆48的上端穿入管46的下部,杆48的下端通过螺纹连接到过渡件98上,销轴49将过渡件98和连接件99连接在一起,连接件99下部连接有杆50,杆50中部的凸起被限制在塞子51和鞍座52之间,爪53通过销轴66连接到塞子51上,杆弹簧55的上部固定在杆50下部的孔中,杆弹簧55的下部穿入叉形件58上部的孔中,抓爪59固定在叉形件58上。
如图1所示,导向柱驱动机构1、抓手驱动结构2a、齿条驱动结构2b安装在中间减速器3上,导向柱8和旋转柱4通过连接框架5连成一体,齿条30水平传动轴6和抓手水平传动轴7用于传递转动以分别驱动齿条30和抓爪59上下运动。所述的该装置安装在一个密封的房间内,房间的下面是反应堆主容器10,从反应堆主容器10上伸出接管9,燃料组件11是所述的本装置需要抓取和释放的载荷,燃料组件11在反应堆主容器10内,所述的该装置的齿条30和抓爪59要从导向柱8中伸出,通过接管10至反应堆主容器10内,将燃料组件11取走,或者将燃料组件11通过接管9放入反应堆主容器10内。
如图2所示,所述的该装置的传动原理在此表示出来。本装置的传动链有三条,分述如下:
导向柱8的传动::导向柱驱动机构1通过联轴器103将运动传递给齿轮71,齿轮71将运动传递给齿轮72,齿轮72是和旋转柱连接成一体的,于是齿轮72转动就带动旋转柱4在轴承81和轴承82的支撑下转动,此转动运动通过连接框架5传递给导向柱8,最终使导向柱8转动。导向柱驱动机构1是自锁的,即传动链反相传动是不能完成的,这样可以保证导向柱8的定位精度。
抓手的传动链:位于图2中间的抓手驱动机构2a、用于驱动抓爪59上下运动。抓手驱动机构2a的运动通过联轴器104传递给齿轮73,然后传递给齿轮74,再传递给伞齿轮79,再传递给伞齿轮80,经过连轴器12c、抓手水平传动轴7、联轴器12d将运动传递给伞齿轮13,再传递给伞齿轮14、齿轮19、齿轮18和抓手驱动轴23,然后运动传递给蜗蜗杆21,蜗杆21驱动蜗轮22,蜗轮22和链轮20在同一根轴上,于是最终将驱动链轮20转动,再通过链节45的运动实现带动抓手上下的运动。蜗杆21和蜗轮22之间的传动是自锁的,即蜗杆21可以带动蜗轮22,蜗轮22不能带动蜗杆21。这保证抓手不会从齿条30中间的孔向下滑动,确保抓手的定位精度和安全性。
齿条30的传动链:位于图2右侧的齿条驱动机构2b用于驱动齿条30的上下运动,齿条驱动机构2b通过联轴器105将运动先后传递给齿轮76、齿轮75、伞齿轮77、伞齿轮78、联轴器12a、齿条水平传动轴6、联轴器12b、伞齿轮34、伞齿轮35、齿条驱动轴36、蜗杆27、蜗轮28,蜗轮28和齿轮29在同一根轴上,蜗轮28的转动的同时齿轮29也转动,齿轮29转动带动齿条30上下运动。蜗杆27和蜗轮28之间的传动是自锁的,即蜗杆27可以带动蜗轮28,蜗轮28不能带动蜗杆27。这保证持齿条30不会从导向柱8上向下滑动,确保齿条30的定位精度和安全性。
如图3、图4所示,为观察的方便,箱体33的一部分被隐去。支撑架17固定在箱体33上,链轮20、蜗杆21和蜗轮22在箱体33内部,蜗杆21套在抓手驱动轴23上,抓手驱动轴23上有长键槽,蜗杆21套在抓手驱动轴23上,在高度方向上蜗杆21连同箱体33一起可以沿抓手驱动轴23上下运动,同时蜗杆21通过键连接到抓手驱动轴23的长键槽上,抓手驱动轴23转动可以带动蜗杆21转动。齿条30固定在箱体33下部。支撑架17固定在箱体33的顶部,滚轮16固定在支撑架17上,滚轮16可以绕其轴转动,滚轮6有两个,相对布置在支撑架17的两侧。轨道15有两个,对称布置在导向柱8的内壁上,轨道中间有长槽。两个滚轮16分别嵌入对称布置的轨道15的长槽内。
抓手驱动轴23的下端插入到联轴器24内,抓手驱动轴23的下端是可以从连轴器24内拔出的。连轴器24和短轴83连接成一体,短轴83固定在轴支撑25上,短轴83只可以在轴支撑25内转动,不可以脱出轴支撑25。轴支撑25固定在导向柱8上并与之连成一体。抓手驱动轴23的上部连接到齿轮18上,并与其连成一体,齿轮18连接到吊装头31上,齿轮18可以相对吊装头31转动,不能从其上脱出。吊装头31固定在导向柱8的顶部,并与之连成一体,吊装头31和导向柱8的固定方式采用可拆开的固定方式。如此,抓手驱动轴23的上部位置和下部位置都在导向柱8上进行了定位,在吊装头31固定在导向柱8顶部的固定没有拆开的情况下,抓手驱动轴23在导向柱8内转动时,抓手驱动轴23在其轴向不能蹿动。
驱动齿条30的蜗杆26、蜗轮28和齿轮29布置在传动箱体27内,传动箱体27通过紧固件固定在导向柱8的底部,并与之连成一体。齿条30从传动箱体27内穿过。
吊装头31和吊装头32端部用于方便吊装而设置。
如图5所示,齿条驱动轴36上端由箱体84定位,齿条驱动轴36下端连接到连轴器85上,联轴器85固定在短轴86上并与之成一体,短轴28和蜗杆26也是一体的。
如图6、图7所示,链轮20在箱体33内,箱体33的内部空间恰好容纳链轮20及其上的链节45,吊装头37单纯为方便吊装箱体33而临时设置,在该装置组装时应被拆除。限位键38限制住撞块40继续向上运动,即限位键38用于撞块40的上行程限制。法兰39将齿条30固定在箱体33上,并使齿条30和箱体33成为一体。
传感器41用于探测信号杆87的位置,信号杆87的上端部设置磁体88,该磁体88用于触发传感器41。弹簧42用于辅助信号杆87复位。传感器41固定在齿条30上。
缓冲弹簧43在管46内,管46的上端通过螺纹连接撞块40上,管46的下端通过螺纹连接到螺母47上,螺母47用于限定杆48在齿条30中的径向位置。杆48的上端穿入管46的下部,杆48的下端通过螺纹连接到过渡件98上,销97用于杆48和过渡件98之间连接的防松。销轴49将过渡件98和连接件99连接在一起,滚轮69装在销轴49上,用于限定该处在水平方向的位置。杆50通过螺纹连接到连接件99上,销100用于此处连接的防松。
塞子51通过螺纹和鞍座52连接。杆50中部的凸起被限制在塞子51和鞍座52之间,杆50中部凸起的上表面为外球面,该球面和塞子51下部的内球面对应,两个球面是配合的,塞子51的中间孔是锥孔,杆50可以相对塞子51沿相互配合的球面在塞子51的锥孔的范围内转动。鞍座52的内部凸起为外球面,杆50的凸起的下表面为内球面,这两个球面是配合的,杆50可以相对鞍座52沿相互配合的球面在塞子51的锥孔的范围内转动。
爪53通过销轴66连接到塞子51上,爪53有三个沿圆周方向均布。小弹簧54套在轴90上,并同时嵌入爪53上的孔内,轴90的下部为球面,该球面在小弹簧54的作用下紧压在塞子51上,起到辅助爪53复位的作用。抓爪59通过销轴68固定在叉形件58上,抓爪59有三个,沿圆周均布,三个抓爪59固定在叉形件上后,在重力的作用下自然下垂,形成图13所示的圆柱形,且其下部形成一个外锥面92。在图7所示的状态下,三个抓爪59所形成的外锥面92座在管89下部的内锥面93上,这两个锥面是配合的。这样抓爪59就被管89限制住了。
销轴91穿过叉形件58上部水平方向的孔,并用销94将销轴91固定在叉形件58上,与之成一体。滚轮70安装在销轴91上。杆50最下部的凸起面是一个球面,该球面在叉形件58和销轴91连接处的孔内,叉形件58可以相对杆50上下运动,同时叉形件58可以沿杆50最下部的球面旋转而使叉形件58和杆50中心线成一定角度。
杆弹簧55的上部插入杆50下部的孔中,销95穿过杆弹簧55和杆50将杆弹簧55固定在杆50上。杆弹簧55的下部穿入叉形件58上部的孔中,并可以在该孔中滑动。弹簧56套在杆弹簧55上。所述的连接关系在图11示出。杆弹簧55用于恢复叉形件58和杆50的同心。弹簧56用于叉形件58的复位,同时弹簧56用于将抓爪59紧压在管89上。
弹簧57穿在信号杆63上,信号杆63穿过叉形件58中间的孔,通过挡圈67,见图9,固定在短杆64上,短杆64固定在管65下部的孔上,管65通过紧固件和短管96连接成一体。
当燃料组件11被抓爪59抓住时,燃料组件11的头部将信号杆63顶起一段距离,同时短杆64、管65和短管96也被信号杆63顶起。如果抓爪59位于齿条30内的上部位置,信号杆87就被顶起一定高度,同时磁体88也被顶起一定高度,传感器41就能探测到磁体88的位移,并据此判断出抓爪59抓住燃料组件11与否。
如图8所示,该图表示了位置G1-G1处的剖面。爪53通过销轴66固定在塞子51上。
如图9所示,该图表示G2-G2位置处的剖面。信号杆63通过挡圈67固定在短杆64上。
如图10所示,该图表示G3-G3位置处的剖面。抓爪59通过销68固定在叉形件58上。
如图11所示,该图表示L-L位置处的剖面。该图表示出杆48、过渡件98、杆弹簧55等的连接关系。
如图12所示,该图表示G4-G4位置处的剖面。该图表示出螺母47、管46、_滚轮69和齿条30之间的连接关系。
如图13所示,该图表示三个抓爪59座在管89上且三个抓爪59闭合时的状态。
该装置的工作过程有三个:1)抓取燃料组件。2)导向柱从一个工作位置旋转到另一个工作位置。3)释放燃料组件。导向柱8的旋转过程已在导向柱8的转到中描述,本部分不再描述。该装置的初始状态:该装置的导向柱8对准一个工作位置,齿条30在导向柱8的上部位置,抓手在齿条30的上部位置。
抓取燃料组件的过程如下:
a)抓手从上部位置运动到下部位置
如图6、图7所示,抓手在从上部位置运动到下部位置的过程中,链轮20驱动链节45在齿条30内向下运动,链节45通过管46将向下了力传递给弹簧43,弹簧43将力传递给杆48,杆48向下推杆50,杆50和鞍座52的球面接触,于是整个抓手向下运动。
抓手是沿着齿条30内部的长槽60向下运动的,长槽60终止于长圆孔61。抓手向下运动直至滚轮70运动到长槽60的末端,滚轮70就不能再向下运动,即滚轮70就挂在长圆孔61的下表面上,同时销轴91也不能相下运动,叉形件58也不能向下运动,抓爪59也不能向下运动了。此时链节45在齿条30内继续向下运动,鞍座52就相对叉形件58向下运动,鞍座52下表面和叉形件58上表面之间的距离就减小,随着该距离的减小,其一爪53被向外逐渐挤出并进入齿条30下部的三个长孔62,其二、管89相对于抓爪59向下运动,管89下部的内锥面91和三个抓爪59的外锥面92之间在高度方向就产生间隙,由于存在此间隙,抓爪59向外张开的空间就产生了,抓爪59就处于松脱的状态。最终鞍座52下表面和叉形件58上表面之间的距离变为零。爪53从长孔62中挤出,抓爪59处于松脱的状态。
b)齿条30从上部位置移动到下部位置
齿轮29驱动齿条30从初始位置向下运动,同时抓手跟随齿条30向下运动,直至最下面的锥面101和燃料组件11上的锥面102接触,缓冲弹簧43降低了管89对燃料组件11的冲击。燃料组件11的头部完全进入三个抓爪59中。在此过程中,燃料组件8的头部将信号杆63顶起,同时短管96相对塞子51向上运动,在短管96下表面和塞子上表面离开一定的距离。
齿条30再向下运动一小段距离,管46向下运动,杆48不动,于是就压缩缓冲弹簧43,齿条30向下的这一小段距离的作用:其一方面保证管89紧压在燃料组件上,其二保证在燃料组件11的高度有偏差的情况下依然能被抓住。此时,齿条30到达其下部位置,管89的锥面101和燃料组件11的锥面102紧帖在一起。
在燃料组件11进入管89的过程中管89下部的锥面101有导向的作用,同时管89的下部可以在水平方向上有一定的活动范围,即管80的下部可以偏离齿条30的中心这保证在燃料组件11的水平位置有偏差的情况下,依然能抓住燃料组件11。
c)爪手从下部位置移动到上部位置
齿条30到达下部位置后,抓手开始从下部位置向上部位置移动。在抓手向上运动的过程中,首先管46向上运动,被压缩的缓冲弹簧43被释放,然后,管46向上带动杆48和杆50,杆50带动鞍座52向上运动,随着鞍座52向上运动,爪53被位于齿条30上长孔62上部的斜面106限制住,而逐渐进入齿条30内部,鞍座52的下表面和叉形件58的上表面之间的间隙逐渐恢复,管89下部的内锥面93和三个抓爪59下部的外锥面92贴合,抓爪59处抓紧的状态。此时燃料组件11已被抓手抓住,爪53被齿条30的壁挡住,确保抓爪59不松脱。抓手再向上运动至上部位置的过程中,抓爪59始终是关闭的,且由于爪53被齿条30的壁挡住,确保了抓爪59不松脱。
在抓手到达上部位置后,信号杆87被顶起一定的距离,传感器41探测磁体88的位置,据此可以判断抓手是否抓住了燃料组件11。
d)齿条30从下部位置运动到上部位置
抓手到达上部位置后,齿条30开始从下部位置向上运动直至运动到上部位置。在齿条30向上运动的过程中,抓手跟随齿条30一起向上运动。齿条30运动到上部位置后,燃料组件11就完全在导向柱8内部了。旋转导向柱8对准下一个工作位置就可以进行燃料组件的释放了。
释放燃料组件的过程如下所述,各个机构的运动已在“抓取燃料组件的过程”中有描述。
a)齿条30从上部位置运动到下部位置。
b)抓手从上部位置运动到下部位置。
此过程将燃料组件11放置到规定的工作位置,在抓手道达下部位置后,抓爪59处于松脱的状态。
c)齿条30回上部位置。
由于抓爪59处于松脱的状态,在齿条30从下部位置运动到上部位置的过程中,抓爪59不能再抓住燃料组件11,燃料组件11就被放置在导向柱8对准的该工作位置。
d)抓手回上部位置。
抓手回到上部位置后,由于燃料组件11已经被放下,信号杆63不再被燃料组件11的头部顶起,信号杆87在抓手到达上部位置后处于图7所示的状态,传感器41探测磁体88的位置,据此判断燃料组件11是否被放下。
一种燃料组件转运机专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。







动态评分
0.0