









专利摘要
光学模块(1A)包括:半导体基板(2);静电致动器(10),其具有固定部(11)和可动部(12),该固定部(11)固定在半导体基板(2),该可动部(12)通过在与固定部(11)之间产生的静电力相对于固定部(11)移动;第一弹簧部(20),其与可动部(12)连接,具有第一弹簧常数K1;第二弹簧部(30),其连接至第一弹簧部(20)与半导体基板(2)之间,具有比第一弹簧常数K1大的第二弹簧常数K2;可动反射镜(5),其是连接至第一弹簧部(20)与第二弹簧部(30)的连接部(13)的光学部件,由此实现能够使用静电致动器、稳定且高精度地使光学部件动作的光学模块。
权利要求
1.一种光学模块,其特征在于,
具备:
半导体基板;
静电致动器,具有固定于所述半导体基板的固定部、以及通过在与所述固定部之间产生的静电力相对于所述固定部移动的可动部;
第一弹簧部,连接于所述可动部,并具有第一弹簧常数;
第二弹簧部,连接于所述第一弹簧部与所述半导体基板之间,并具有比所述第一弹簧常数大的第二弹簧常数;
光学部件,连接于所述第一弹簧部与所述第二弹簧部的连接部;以及
控制部,其检测所述固定部与所述可动部之间的静电电容,并根据该检测结果向所述固定部与所述可动部之间施加驱动电压,由此控制所述光学部件的移动距离,
所述可动部、所述第一弹簧部、所述第二弹簧部和所述光学部件在所述半导体基板一体地形成,
所述光学部件相对于所述半导体基板平行地被驱动,
所述第一弹簧部具有固定有所述可动部的一端、以及成为所述连接部的另一端,
所述第二弹簧部具有成为所述连接部的一端、以及固定于所述半导体基板的另一端。
2.一种光学模块,其特征在于,
具备:
半导体基板;
静电致动器,具有固定于所述半导体基板的固定部、以及通过在与所述固定部之间产生的静电力相对于所述固定部移动的可动部;
第一弹簧部,连接于所述可动部,并具有第一弹簧常数;
第二弹簧部,连接于所述第一弹簧部与所述半导体基板之间,并具有比所述第一弹簧常数大的第二弹簧常数;
光学部件,连接于所述第一弹簧部与所述第二弹簧部的连接部;以及
控制部,其检测所述固定部与所述可动部之间的静电电容,并根据该检测结果向所述固定部与所述可动部之间施加驱动电压,由此控制所述光学部件的移动距离,
所述可动部、所述第一弹簧部、所述第二弹簧部和所述光学部件在所述半导体基板一体地形成,
所述光学部件相对于所述半导体基板垂直地被驱动,
所述第一弹簧部具有固定于所述半导体基板的一端、以及成为所述连接部的另一端,
所述第二弹簧部具有成为所述连接部的一端、以及固定于所述半导体基板的另一端,
所述可动部连接于所述第一弹簧部的中间部。
3.如权利要求1或2所述的光学模块,其特征在于:
所述光学部件是法布里-珀罗干涉滤光器的可动反射镜。
4.如权利要求1或2所述的光学模块,其特征在于:
所述第一弹簧部包含并列设置的多个第一弹簧,
所述第二弹簧部包括并列设置的多个第二弹簧。
5.如权利要求3所述的光学模块,其特征在于:
所述第一弹簧部包含并列设置的多个第一弹簧,
所述第二弹簧部包括并列设置的多个第二弹簧。
说明书
技术领域
本发明涉及使用MEMS(Micro Electro Mechanical Systems:微机电系统)技术的光学模块。
背景技术
作为使用MEMS技术的光学模块,例如具有包括静电致动器和法布里-珀罗干涉滤光器的光学模块。在法布里-珀罗干涉滤光器,利用静电致动器使一对反射镜间的距离发生变化,使具有与该距离相应的波长的光透射。因此,为了提高法布里-珀罗干涉滤光器的波长分辨率,需要使用静电致动器使反射镜稳定且高精度地动作。
因此,提案有通过检测静电致动器的静电电容的变化来控制反射镜的动作的技术(例如,参照专利文献1)。根据该技术,与施加电压的不稳定程度、周围温度的变化等无关,均能够使反射镜恰当地动作。
现有技术文献
专利文献
专利文献1:美国专利申请公开第2011/0222067号
发明内容
发明所要解决的问题
但是,越提高法布里-珀罗干涉滤光器的波长分辨率,越不容易恰当地检测静电致动器的静电电容的微小变化。因此,根据专利文献1记载的技术,也存在不能使用静电致动器使反射镜稳定且高精度地动作的问题。
因此,本发明的目的在于,提供能够使用静电致动器使光学部件稳定且高精度地动作的光学模块。
用于解决问题的方式
本发明的光学模块包括:半导体基板;静电致动器,其具有固定部和可动部,该固定部固定在半导体基板,该可动部通过在与固定部之间产生的静电力相对于固定部移动;第一弹簧部,其与可动部连接,具有第一弹簧常数;第二弹簧部,其连接至第一弹簧部与半导体基板之间,具有比第一弹簧常数大的第二弹簧常数;和连接至第一弹簧部与第二弹簧部的连接部的光学部件。
在该光学模块,静电致动器的可动部与具有第一弹簧常数的第一弹簧部连接,光学部件连接至第一弹簧部与第二弹簧部的连接部。此外,第一弹簧常数设定得比第二弹簧常数小。因此,与通过静电力移动的静电致动器的可动部的移动距离相比,光学部件的移动距离小。因此,通过利用可动部的移动距离的控制来控制光学部件的移动距离,能够使用静电致动器使光学部件稳定且高精度地动作。
发明的效果
根据本发明,能够提供能够使用静电致动器使光学部件稳定且高精度地动作的光学模块。
附图说明
图1是第一实施方式的光学模块的平面图。
图2是图1的光学模块的沿II-II线的截面图。
图3是表示图1的光学模块的电路结构的图。
图4是表示图1的光学模块的动作原理的图。
图5(a)、(b)是表示图1的光学模块的制造工序的截面图。
图6(a)、(b)是表示图1的光学模块的制造工序的截面图。
图7是表示图1的光学模块的制造工序的截面图。
图8是第二实施方式的光学模块的平面图。
图9是图8的光学模块的沿IX-IX线的截面图。
图10(a)、(b)是图8的光学模块的沿X-X线的截面图。
图11(a)、(b)是表示图8的光学模块的制造工序的截面图。
图12(a)、(b)是表示图8的光学模块的制造工序的截面图。
图13(a)、(b)是表示图8的光学模块的制造工序的截面图。
具体实施方式
以下,参照附图对本发明的光学模块的实施方式进行详细说明。另外,在各图中,在相同或相当的部分标注相同的附图标记,省略重复的说明。
(第一实施方式)
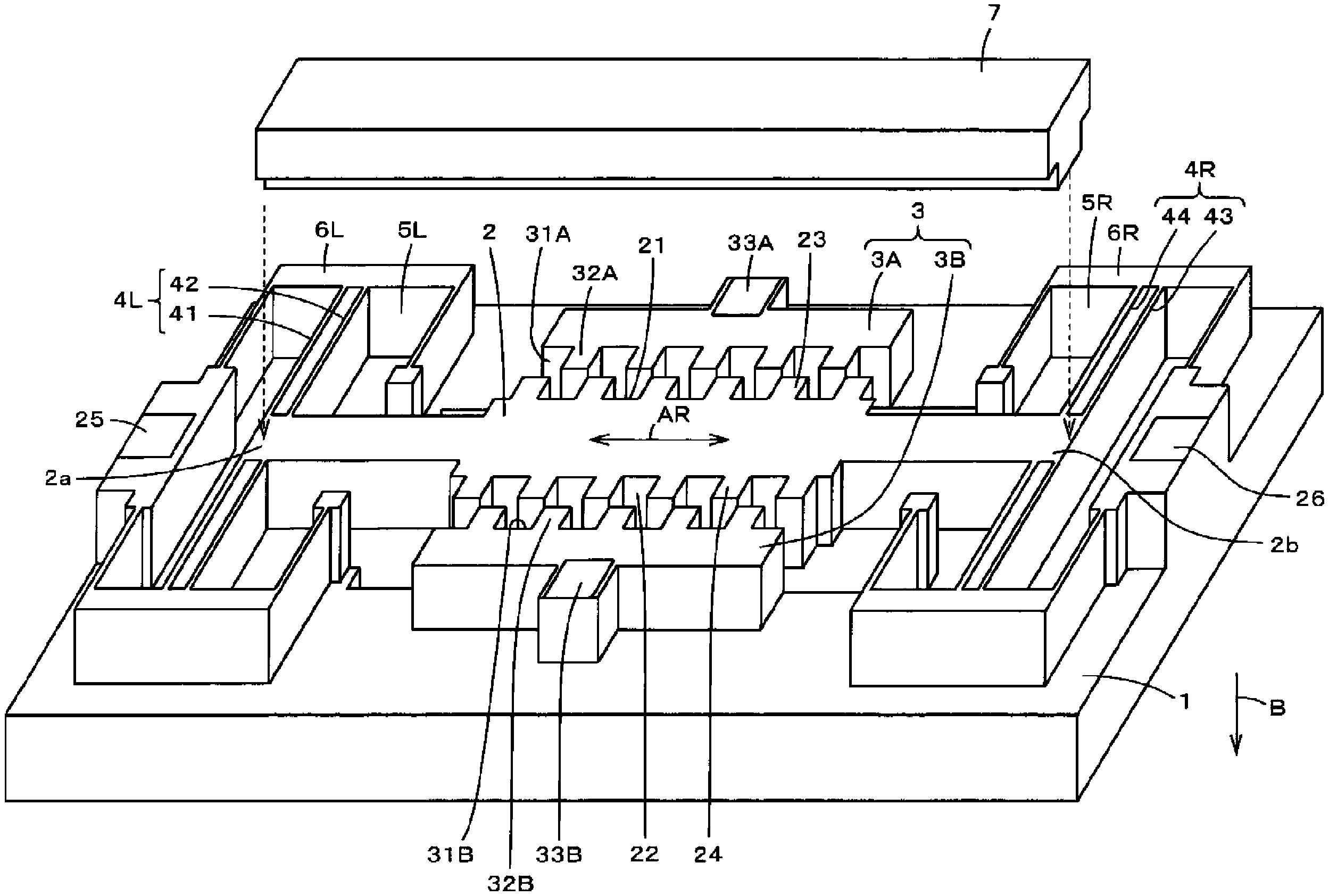
图1是第一实施方式的光学模块的平面图。此外,图2是图1的光学模块的沿II-II线的截面图。
如图1和图2所示,光学模块1A包括半导体基板2。在半导体基板2上设置有入射反射镜3、法布里-珀罗干涉滤光器F、出射反射镜6、静电致动器10、第一弹簧部20和第二弹簧部30。法布里-珀罗干涉滤光器F具有以隔着空隙S相对的方式配置的固定反射镜4和可动反射镜(光学部件)5。静电致动器10的驱动通过控制部70控制。
光学模块1A例如是将SOI(Silicon On Insulator:绝缘体上硅晶片)基板作为起始物料制作的MEMS器件。在光学模块1A,通过蚀刻隔着绝缘层8设置在半导体基板2上的半导体层9,形成半导体基板2上的各结构。在第一实施方式中,半导体基板2由硅(Si)构成,呈矩形板状形成。此外,绝缘层8由氧化硅(SiO2)构成,半导体层9由硅(Si)构成。
入射反射镜3由半导体层9的一部分构成,隔着绝缘层8固定在半导体基板2的表面2a。入射反射镜3具有相对于半导体基板2的表面2a倾斜45°的镜面3a。镜面3a将从与半导体基板2的表面2a垂直的方向射入的被测定光L向法布里-珀罗干涉滤光器F侧反射。
出射反射镜6由半导体层9的一部分,隔着绝缘层8固定在半导体基板2的表面2a。出射反射镜6在静电致动器10的驱动方向A以隔着法布里-珀罗干涉滤光器F与入射反射镜3相对的方式配置。出射反射镜6具有相对于半导体基板2的表面2a倾斜45°的镜面6a。镜面6a将从法布里-珀罗干涉滤光器F透射后的被测定光L向与半导体基板2的表面2a垂直的方向反射。
法布里-珀罗干涉滤光器F的固定反射镜4由半导体层9的一部分构成,通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态。固定反射镜4的两端部以两端支撑的梁那样的状态固定在支柱4a、4b。支柱4a、4b由半导体层9的一部分构成,隔着绝缘层8固定在半导体基板2的表面2a。
法布里-珀罗干涉滤光器F的可动反射镜5由半导体层9的一部分构成,通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态。可动反射镜5的两端部5a、5b通过支承部14、15连接至第一弹簧部20与第二弹簧部30的连接部13,成为能够向静电致动器10的驱动方向A移动的状态。
固定反射镜4和可动反射镜5的相对方向D相对于静电致动器10的驱动方向A倾斜。固定反射镜4和可动反射镜5使从入射反射镜3侧射入的被测定光L中具有和固定反射镜4与可动反射镜5的间的距离对应的波长的光透射,使该光沿驱动方向A向出射反射镜6侧射出。另外,在第一实施方式中,固定反射镜4配置在入射反射镜3侧,可动反射镜5配置于出射反射镜6侧,但固定反射镜4和可动反射镜5的配置也可以相反。
固定反射镜4和可动反射镜5由2层的硅层构成。这是因为,硅的折射率为3.5,空气的折射率为1,它们的折射率差大,即使是2层的硅层也能够充分地实现反射率高的布拉格镜。另外,固定反射镜4和可动反射镜5也可以为硅层与空气层交替地各多层地叠层而得到的反射镜。在这种情况下,也能够通过与静电致动器10、第一弹簧部20和第二弹簧部30等相同的光掩模和相同的蚀刻工序,高精度且简单地形成固定反射镜4和可动反射镜5。
静电致动器10由半导体层9的一部分构成。静电致动器10具有固定部11和可动部12。固定部11隔着绝缘层8固定在半导体基板2的表面2a。可动部12通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态,通过在与固定部11之间产生的静电力,相对于固定部11向驱动方向A移动。
固定部11是沿半导体基板2的外缘呈矩形框状形成的半导体层9中、相对于法布里-珀罗干涉滤光器F位于出射反射镜6侧的部分。固定部11在与半导体基板2的表面2a平行且与驱动方向A垂直的方向上延伸设置。在驱动方向A上与可动部12相对的固定部11的侧面,形成有具有在与半导体基板2的表面2a平行且与驱动方向A垂直的方向上排列的多个梳齿的梳齿部11a。梳齿部11a通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态。
可动部12位于固定部11与出射反射镜6之间。可动部12在与半导体基板2的表面2a平行且与驱动方向A垂直的方向上延伸设置。在驱动方向A上与固定部11相对的可动部12的侧面,形成有具有在与半导体基板2的表面2a平行且与驱动方向A垂直的方向上排列的多个梳齿的梳齿部12a。固定部11和可动部12以梳齿部11a的各梳齿与梳齿部12a的各梳齿彼此交错地配置的方式构成。
第一弹簧部20与静电致动器10的可动部12连接。第一弹簧部20由半导体层9的一部分构成,通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态。第一弹簧部20包括并列设置的一对第一弹簧21、22。各第一弹簧21、22呈锯齿形形成,能够沿驱动方向A伸缩。
各第一弹簧21、22的一端与可动部12的两端部分别连接,各第一弹簧21、22的另一端与第二弹簧部30连接。由此,第一弹簧部20成为具有固定有可动部12的一端20a(即,各第一弹簧21、22的一端)和成为与第二弹簧部30的连接部13的另一端20b(即,各第一弹簧21、22的另一端)。如以上那样构成的第一弹簧部20具有第一弹簧常数K1。第一弹簧常数K1是将一对第一弹簧21、22的弹簧常数合成得到的数。
第二弹簧部30连接至第一弹簧部20与半导体基板2之间。第二弹簧部30由半导体层9的一部分构成,通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态。第二弹簧部30包括并列设置的一对第二弹簧31、32。各第二弹簧31、32呈锯齿形形成,能够沿驱动方向A伸缩。
各第二弹簧31、32的一端与第一弹簧部20的各第一弹簧21、22的另一端连接,各第二弹簧31、32的另一端隔着绝缘层8固定在半导体基板2的表面2a。由此,第二弹簧部30成为具有成为与第一弹簧部20的连接部13的一端30a(即,各第二弹簧31、32的一端)和固定在半导体基板2的另一端30b(即,各第二弹簧31、32的另一端)。如以上那样构成的第二弹簧部30具有比第一弹簧部20的第一弹簧常数K1大的第二弹簧常数K2。第二弹簧常数K2是将一对第二弹簧31、32的弹簧常数合成而得到的数。
第一弹簧部20和第二弹簧部30作为一体的弹簧与静电致动器10的静电力取得平衡。在第一弹簧部20与第二弹簧部30的连接部13间连接有支承部14,在支承部14,连接有沿驱动方向A向法布里-珀罗干涉滤光器F侧延伸设置的一对支承部15。支承部14、15由半导体层9的一部分构成,通过除去其正下方的绝缘层8而成为悬浮于半导体基板2的表面2a的状态。在各支承部15的前端部分别连接有可动反射镜5的两端部5a、5b。可动部12、第一弹簧部20、第二弹簧部30、支承部14、15和可动反射镜5在半导体基板2一体地形成,在以第二弹簧部30的另一端30b为固定端的悬臂那样的状态被支承在半导体基板2上。
第一弹簧常数K1和第二弹簧常数K2的大小能够通过构成第一弹簧部20和第二弹簧部30的半导体层9的宽度、长度、厚度和弹簧数等进行调整。因为这些数值能够仅通过光掩模设计来决定,所以能够高精度且简单地调整弹簧常数。
梁的弹簧的弹簧常数与梁的宽度的立方成比例,因此仅通过令宽度为10倍就能够制作出弹簧常数相差1000倍的弹簧。例如,当令构成第一弹簧部20的各第一弹簧21、22的梁的宽度为5μm、令构成第二弹簧部30的各第二弹簧31、32的梁的宽度为40μm时,第二弹簧常数K2成为第一弹簧常数K1的约1000倍≈2×(40/5)
另外,第一弹簧部20并不限定于包括一对第一弹簧21、22的情况,也可以由一个弹簧构成,还可以由三个以上弹簧构成。同样,第二弹簧部30并不限定于包括一对第二弹簧31、32的情况,也可以由一个弹簧构成,还可以由三个以上弹簧构成。此外,第一弹簧部20和第二弹簧部30也可以由相互不同的材料形成。
控制部70通过配线18、19与端子16、17分别电连接。端子16与固定部11电连接。端子17通过沟道17a与固定部11电绝缘,通过半导体基板2、第二弹簧部30和第一弹簧部20等与可动部12电连接。控制部70为了驱动静电致动器10而检测固定部11与可动部12的间的静电电容,并根据其检测结果向固定部11与可动部12之间施加驱动电压。另外,在第一实施方式中,可动部12、第一弹簧部20、第二弹簧部30和可动反射镜5由半导体层9一体地形成,因此它们全部为相同电位。
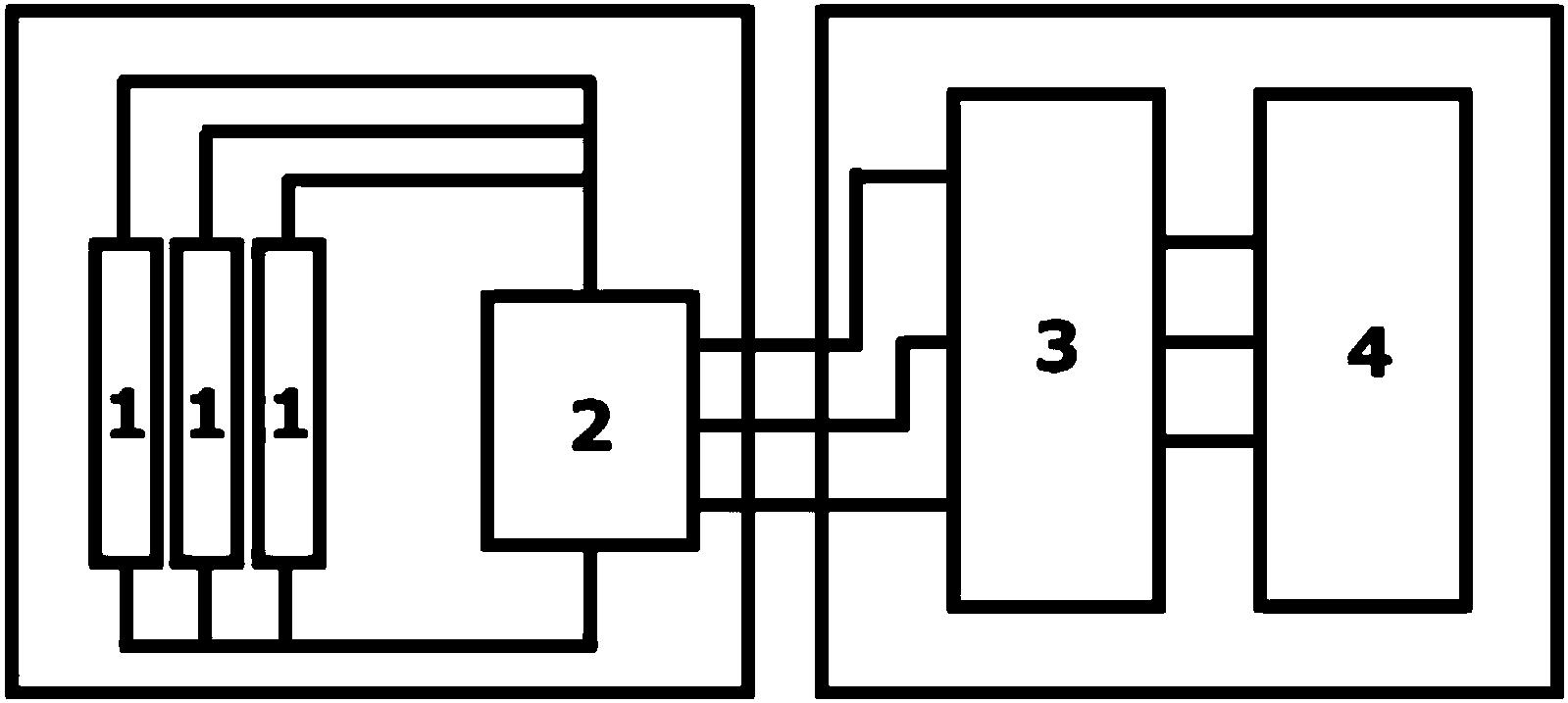
参照图3所示的光学模块的电路结构对控制部70进行更详细的说明。控制部70包括向固定部11与可动部12之间施加驱动电压的可变电源71和输出用于检测固定部11与可动部12的间的静电电容的检测用信号的交流电源72。交流电源72通过耦合电容器73与可动部12电连接。控制部70通过可变电源71和交流电源72向固定部11与可动部12之间施加载有检测用信号的驱动电压。此时,固定部11为GND电平。
控制部70进一步包括静电电容检测部74。静电电容检测部74通过放大器76检测在与固定部11连接的电阻成分75流动的电流,从检测到的电流测量电荷的变动。静电电容检测部74进一步检测交流电源72输出的检测用信号,通过位相差和振幅比测量进行静电电容的检测。此处,检测用信号的频率与静电致动器10的共振频率相比足够高地设定。因此,静电致动器10不响应检测用信号,能够进行静电电容的检测。
静电电容因为固定部11和可动部12的面积(作为电极的面积)为一定,所以成为固定部11与可动部12的间的距离的函数。因此,控制部70能够通过检测固定部11与可动部12的间的静电电容来检测固定部11与可动部12的间的距离、即可动部12的相对于固定部11的移动距离。
在如以上那样构成的光学模块1A,当通过控制部70向静电致动器10的固定部11与可动部12之间施加驱动电压时,在固定部11与可动部12之间产生与该驱动电压相应的静电力。由此,可动部12沿驱动方向A被拉向固定部11。由于可动部12通过第一弹簧部20和支承部14、15与可动反射镜5,因此可动反射镜5与可动部12的移动联动,与半导体基板2平行地(即,向与半导体基板2的表面2a平行的方向)驱动,从而调整可动反射镜5与固定反射镜4的间的距离。此处,可动反射镜5与具有比第一弹簧常数K1大的第二弹簧常数K2的第二弹簧部30也通过支承部14、15连接,因此移动得不如可动部12多。这样,在光学模块1A,相对于可动部12的移动距离,可动反射镜5的移动距离缩小。
而且,由于在法布里-珀罗干涉滤光器F透射的光的波长依赖于可动反射镜5与固定反射镜4的间的距离,因此能够通过调整施加于静电致动器10的驱动电压,适当地选择透射的光的波长。即,当从外部射入被测定光L时,选择具有与可动反射镜5与固定反射镜4的间的距离相应的波长的光,向外部射出。此时,可动反射镜5与固定反射镜4的间的距离的调整能够通过控制部70测量静电致动器10的静电电容、监测可动部12的移动距离地进行。由于可动部12的移动距离是将可动反射镜5的移动距离放大规定的倍率后的值,因此可动反射镜5的位置的控制精度稳定。
参照图4对可动反射镜5的移动距离被放大的、光学模块的动作原理进行说明。在光学模块1A,第一弹簧部20的第一弹簧常数K1和第二弹簧部30的第二弹簧常数K2以成为K1<K2的方式设定。当令与驱动电压相应地在静电致动器10产生的静电力为f时,对第一弹簧部20和第二弹簧部30发挥作用的力也为f。由此,第一弹簧部20的伸长量x1和第二弹簧部30的伸长量x2分别以下式(1)、(2)表示。此外,可动部12的移动距离x作为两个弹簧的伸长量的合计,以下式(3)表示。
x1=f/K1 (1)
x2=f/K2 (2)
x=x1+x2=f(1/K1+1/K2) (3)
此处,x2相当于第一弹簧部20与第二弹簧部30的连接部13的移动距离,与可动反射镜5的移动距离相等。即,可动部12移动不仅可动反射镜5的移动距离而且还加上与第一弹簧部20的伸长量相应的量。例如,当将第二弹簧常数K2以成为第一弹簧常数K1的1000倍的方式设定时,在可动反射镜5的移动距离为1nm的情况下,可动部12的移动距离被放大至1μm(正确而言为1.001μm)。
这样,在静电致动器10的静电力与第一弹簧部20和第二弹簧部30产生的施力取得平衡的状态,可动反射镜5的移动距离和误差为可动部12的移动距离和误差的K1/(K1+K2)≈K1/K2(K2>>K1的情况下)倍,因此通过静电致动器10进行的可动反射镜5的位置的控制精度提高而稳定。此外,在检测可动反射镜5的移动距离时,也只要检测放大后的可动部12的移动距离,因此能够提高检测精度。
接着,对光学模块1A的制造方法的一个例子进行说明。首先,如图5(a)所示那样,作为起始物料准备在半导体基板2的表面2a上隔着绝缘层8形成有半导体层9基板。例如,能够使用利用两个硅基板夹着称为BOX层的氧化膜而构成的SOI基板。接着,在半导体层9上形成氧化膜(SiO2膜)61。氧化膜61作为碱性蚀刻用的掩模发挥作用。进一步,依次成膜氮化膜(SiN膜)62和抗蚀剂63,进行DRIE(Deep Reactive Ion Etching:深反应离子蚀刻)用的图形化。
接着,如图5(b)所示那样,进行DRIE处理,除去半导体层9的一部分,形成静电致动器10、入射反射镜3和出射反射镜6等所需的垂直壁。接着,如图6(a)所示那样,清除抗蚀剂63,之后进行热氧化,由此在利用DRIE处理形成的垂直壁的侧壁形成氧化膜64。氧化膜64作为碱性蚀刻用的掩模发挥作用。此时,氮化膜62下的与氮化膜62侧面对的硅的表面不被氧化。接着,如图6(b)所示那样,利用热磷酸除去氮化膜62,使半导体层9的一部分露出。
接着,如图7所示那样,浸入碱性液体,对半导体层9的露出的部分进行蚀刻,形成入射反射镜3和出射反射镜6的45°面。另外,在45°面的开口的相反侧部分如果以成为90°面的方式选择结晶方位,则在与45°面相对的面会不形成45°面而形成90°面,其结果是,硅通过蚀刻被除去。最后,利用氢氟酸除去氧化膜61、氧化膜64和绝缘层8。这样利用体硅微机械技术制造图1中所示的光学模块1A。另外,入射反射镜3和出射反射镜6的45°面虽然不能在与其它构成要素相同的掩模工序形成,但是只要使具有45°面的入射反射镜3和出射反射镜6的尺寸相对于被测定光L的光束直径足够大,位置精度就不需要那么高,因此没有问题。
如以上说明的那样,在光学模块1A,包括:半导体基板2;静电致动器10,其具有固定在半导体基板2的固定部11和通过在与固定部11之间产生的静电力相对于固定部11移动的可动部12;第一弹簧部20,其与可动部12连接,具有第一弹簧常数K1;第二弹簧部30,其连接至第一弹簧部20与半导体基板2之间,具有比第一弹簧常数K1大的第二弹簧常数K2;和可动反射镜5,其是连接至第一弹簧部20与第二弹簧部30的连接部13的光学部件。
根据该结构,相对于通过静电力移动的静电致动器10的可动部12的移动距离,可动反射镜5的移动距离成为K1/(K1+K2)≈K1/K2(K2>>K1的情况下)倍。这样,与可动部12的移动距离相比,可动反射镜5的移动距离小。因此,通过利用按规定的倍率被放大后的可动部12的移动距离的控制进行可动反射镜5的移动距离的控制,即使在移动距离微小的情况下,可动反射镜5的控制精度也稳定。
一般而言法布里-珀罗干涉滤光器的反射镜间的空隙S的宽度W与透射波长λ的关系在令m为任意的整数时,以式(4)表示。
λ=2W/m (4)
根据上述式(4),透射波长λ的波长分辨率由宽度W的控制精度决定。通过将任意整数m设定得大,宽度W能够设定为作为对象的透射波长λ的m倍,能够提高宽度W的控制精度。例如,当将m设定为10时,相对于1μm的透射波长λ,能够将宽度W设定为10μm。此处,波长分辨率表示波长可变滤光器的透射波长λ的设定能够按多大的波长单位进行。例如,如果波长分辨率为1nm,则能够按1nm单位进行透射波长λ的设定。
另一方面,在法布里-珀罗干涉滤光器,选择波长的高次波长也具有透射特性,选择波长与高次的透射波长的间隔Δλ以式(5)表示。
Δλ=λ/(m+1) (5)
根据上述式(5),通过将任意整数m设定得大,与相邻的高次的透射波长的间隔Δλ缩小1/(m+1)倍。例如,当将m设定为10时,与相邻的高次的透射波长的间隔Δλ成为90nm,相邻的高次的透射波长成为1.09μm。即,具有1.09μm的波长的光也被透射。
作为波长可变滤光器,优选在某个波长范围仅透射选择波长的光,高次的透射波长需要以充分成为该波长范围之外的方式进行设计。为此,需要使m尽量小,理想的是将m设定为1。但是,这样一来空隙S的宽度W必须以所需的波长分辨率的一半的分辨率控制。例如在需要1nm的波长分辨率的情况下,宽度W必须以0.5nm的精度进行控制。这样的控制即使是使用MEMS技术的静电致动器也不容易进行,历来需要制作校正曲线等来消除驱动电压的不稳定程度和周围温度的影响等。
与此相对,在光学模块1A,上述那样的可动反射镜5的移动距离的控制能够通过被这样放大后的静电致动器10的可动部12的移动距离的控制进行。例如,即使在必须以0.5nm的精度进行可动反射镜5的移动距离的控制时,如果将第二弹簧常数K2以相对于第一弹簧常数K1成为1000倍的方式进行设定,可动部12的移动距离也被放大至500nm(正确而言为500.5nm),因此能够容易地进行控制,稳定地提高控制精度。
历来已知有为了检测汽缸等的空气压式操作器的驱动轴的位置而将驱动轴固定在测量板、通过将该测量板连接至弹簧常数不同的两个弹簧的连接部而将驱动轴大的移动距离转换为小的移动距离地进行测量的技术(例如,日本实公平2-40481号公报)。但是,在使用MEMS技术的光学模块,尚不知通过弹簧高精度地检测光学部件的微小变动的技术。
此外,在光学模块1A,进一步包括检测固定部11与可动部12的间的静电电容、根据其检测结果向固定部11与可动部12之间施加驱动电压的控制部70。由此,能够通过静电电容检测静电致动器10的可动部12的位置,因此能够适当地消除驱动电压的不稳定程度、周围温度等对可动反射镜5的位移的影响。
当要对作为MEMS的特征的高速性加以利用时,以共振模式动作,在这种情况下,已不能通过驱动电压直接控制空隙S。此外,共振模式下的振幅宽度受到周围的气体(气压)的特性的影响,每次使用时滤光器特性都会发生变化,因此在现有技术中并不缺乏在气密密封了的容器内以一定温度使用等措施。因此,在现有技术中也不依赖于驱动电压地通过静电电容检测静电致动器的可动部的位置。但是,例如在电极部面积为500μm
与此相对,在光学模块1A,即使在可动反射镜5的移动距离微小的情况下,静电致动器的可动部12的移动距离也以规定的倍率被放大,静电电容的变化随之被放大,容易进行静电电容的测定。
此外,在光学模块1A,通过稳定地提高法布里-珀罗干涉滤光器F的可动反射镜5的位置的控制精度,能够提高法布里-珀罗干涉滤光器F的波长分辨率。
此外,在光学模块1A,可动部12、第一弹簧部20、第二弹簧部30和可动反射镜5在半导体基板2一体地形成。例如,压电致动器能够利用固体材料的压电效应,高精度地进行纳米级的控制,但是为了使用它构成波长可变滤光器,需要组装多个部件。与此相对,光学模块1A能够使用MEMS技术从设置在半导体基板2上的半导体层9的一块板单片地形成可动部12、第一弹簧部20、第二弹簧部30和可动反射镜5。由此,能够将制造工序单纯化,降低制造成本。
此外,在光学模块1A,第一弹簧部20具有并列设置的两个第一弹簧21、22,第二弹簧部30具有并列设置的两个第二弹簧31、32的。因此,例如无论哪一个弹簧受到损伤的情况下,均容易使得可动部12和可动反射镜5的支承稳定。
此外,在光学模块1A,可动反射镜5与半导体基板2平行地驱动。此外,第一弹簧部20和第二弹簧部30与半导体基板2平行地伸缩。根据该结构,能够通过适当地放大半导体基板2的尺寸,容易地放大与第一弹簧部20和第二弹簧部30连接的可动部12的可动范围。因此,能够容易地将可动部12的移动距离变大,更稳定且高精度地进行可动反射镜5的动作。进一步,能够适当地运用使用表面微机械技术的制造方法。
此外,在光学模块1A,第一弹簧部20具有固定有可动部12的一端20a和成为与第二弹簧部30的连接部13的另一端20b,第二弹簧部30具有成为与第一弹簧部20的连接部13的一端30a和固定在半导体基板2的另一端30b。根据该结构,能够将第一弹簧部20整体的伸长量作为可动部12的移动距离,容易地使可动部12的移动距离变大。因此,能够更稳定且高精度地进行可动反射镜5的动作。
(第二实施方式)
图8是第二实施方式的光学模块的平面图。此外,图9是图8的光学模块的沿IX-IX线截面图。此外,图10是图8的光学模块的沿X-X线截面图。
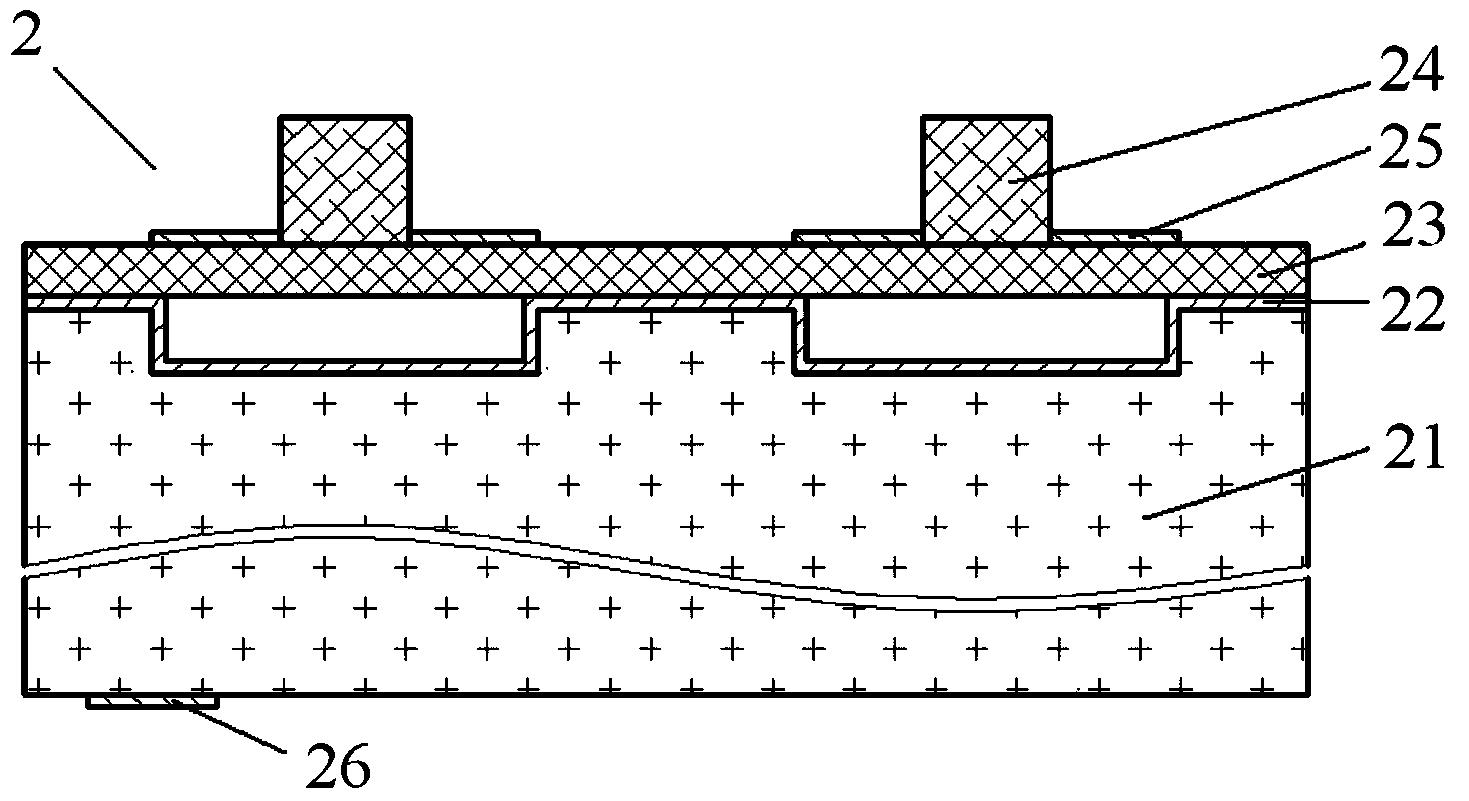
如图8和图9所示,光学模块1B包括半导体基板2。在半导体基板2上依次叠层有氧化膜81、第一叠层体40、中间层82和第二叠层体50,法布里-珀罗干涉滤光器F作为MEMS器件构成。在第二实施方式中,半导体基板2由硅(Si)构成,呈矩形板状形成。此外,氧化膜81由氧化硅(SiO2)构成,中间层82例如由氧化硅(SiO2)构成。
在第一叠层体40与第二叠层体50之间通过沿半导体基板2的外缘呈矩形框状形成的中间层82,形成有空隙S。法布里-珀罗干涉滤光器F在于其中央部划分成的光透射区域83、使从半导体基板2的相反侧射入的被测定光L中具有与第一叠层体40与第二叠层体50的间的距离相应的波长的光透射,将该光向半导体基板2侧射出。另外,中间层82的厚度例如为200nm~10μm。中间层82的光学厚度与第一叠层体40与第二叠层体50的间的距离相当,因此优选为中心透射波长(即,作为法布里-珀罗干涉滤光器F透射的波长的可变范围的中央的波长)的1/2的整数倍。
第一叠层体40通过多个多晶硅层41和多个氮化硅层42各一层交替地叠层而构成。在第二实施方式中,在氧化膜81上依次叠层有多晶硅层41a、氮化硅层42a、多晶硅层41b、氮化硅层42b和多晶硅层41c。第一叠层体40中与光透射区域83对应的部分作为固定反射镜4发挥作用。
第二实施方式的固定反射镜4成为3层多晶硅层41和2层氮化硅层42交替地叠层而构成的布拉格镜。多晶硅层41是通过非晶硅退火而多结晶化构成的层。各层41、42的厚度为50nm~2μm。在第二实施方式中,各多晶硅层41的厚度为130nm,各氮化硅层42的厚度为200nm。另外,构成固定反射镜4的各多晶硅层41和各氮化硅层42各自的光学厚度优选为中心透射波长的1/4的整数倍。
构成第一叠层体40的多晶硅层41c中包围光透射区域83的外缘部作为静电致动器10的固定部11发挥作用。固定部11通过沿其内缘呈环状延伸设置的沟道43与包含光透射区域83的内侧的区域电绝缘。另外,在沟道43的一部分残存有中间层82。
第二叠层体50与第一叠层体40一样地通过多个多晶硅层51与多个氮化硅层52各一层交替地叠层而构成。在第二实施方式中,在中间层82上依次叠层有多晶硅层51a、氮化硅层52a、多晶硅层51b、氮化硅层52b和多晶硅层51c。第二叠层体50通过蚀刻被部分地除去,未被蚀刻而残存的部分成为规定的形状。第二叠层体50中与光透射区域83对应的部分作为隔着空隙S与固定反射镜4相对的可动反射镜(光学部件)5发挥作用。
第二实施方式的可动反射镜5成为3层多晶硅层51和2层氮化硅层52交替地叠层而构成的布拉格镜。多晶硅层51是通过非晶硅退火而多结晶化构成的层。各层51、52的厚度为50nm~2μm。在第二实施方式中,各多晶硅层51的厚度为130nm,各氮化硅层52的厚度为200nm。另外,构成可动反射镜5的各多晶硅层51和各氮化硅层52各自的光学厚度优选为中心透射波长的1/4的整数倍。
构成固定反射镜4和可动反射镜5的布拉格镜的多层膜只要对对象波长透明且折射率不同,就可以不必为多晶硅层与氮化硅层的组合。不过,因为与空隙S侧相接的层(在第二实施方式中为多晶硅层41c和多晶硅层51a)兼作电极,所以需要成为导电率高的膜。此外,如果折射率差小,则为了提高反射率而所需的层数增加,因此尽量选择折射率差大的层的组合即可。
第二叠层体50中光透射区域83的外侧的部分进一步包括分别作为第一弹簧部20、第二弹簧部30和静电致动器10的可动部12发挥作用的部分。在第二叠层体50,还均匀地分布有从第二叠层体50的表面50a至空隙S的多个贯通孔50b。贯通孔50b以对可动反射镜5的功能没有实质上的影响的程度形成。贯通孔50b的直径为100nm~5μm,贯通孔50b的开口面积占可动反射镜5的面积的0.01~10%。
第一弹簧部20由第二叠层体50的一部分构成,能够向与半导体基板2垂直的方向位移。第一弹簧部20以可动反射镜5为中心包括呈放射线状并列设置的四个第一弹簧21~24。
第一弹簧部20具有被固定在第二叠层体50中设置在框状的中间层82上的外缘部50c的四个一端20a(即,各第一弹簧21~24的一端)。此外,第一弹簧部20具有成为与第二弹簧部30的连接部13的四个另一端20b(即,各第一弹簧21~24的另一端)。进一步,第一弹簧部20具有与可动部12连接的四个中间部20c(即,各第一弹簧21~24的中间部)。第一弹簧部20具有第一弹簧常数K1。此处,第一弹簧常数K1表示向与第一弹簧部20的中间部20c的半导体基板2垂直的方向的位移容易程度。此外,第一弹簧常数K1是将四个第一弹簧21~24的弹簧常数合成得到的数。
第二弹簧部30由第二叠层体50的一部分构成,能够向与半导体基板2垂直的方向位移。第二弹簧部30以可动反射镜5为中心包括呈放射线状并列设置的四个第二弹簧31~34。第二弹簧31~34在可动反射镜5的周围与第一弹簧21~24交替地设置。
第二弹簧部30具有成为与第一弹簧部20的连接部13的四个一端30a(即,各第二弹簧31~34的一端)。此外,第二弹簧部30具有通过残存于沟道43的中间层82等固定在半导体基板2的四个另一端30b(即,各第二弹簧31~34的另一端)。第二弹簧部30具有比第一弹簧常数K1大的第二弹簧常数K2。此处,第二弹簧常数K2表示向与第二弹簧部30的一端30a的半导体基板2垂直的方向的位移的容易程度。此外,第二弹簧常数K2是将四个第二弹簧31~34的弹簧常数合成得到的数。另外,在第二实施方式中,理论上第一弹簧21~24与第二弹簧31~34的四个连接部13分别在可动反射镜5的中心重叠。
第二叠层体50中构成与包围可动反射镜5和第二弹簧部30的圆环部50d对应的部分的多晶硅层51a作为可动部12发挥作用。可动部12通过沿其内缘设置于多晶硅层51a的沟道53与包含光透射区域83的内侧的区域电绝缘。
另外,在第二实施方式中,如果沟道53设置在多晶硅层51a中所有在相对方向D与沟道43相对的部分,至少设置在第一弹簧部20的部分,则能够实现包含光透射区域83的内侧的区域与可动部12的电绝缘。在沟道53埋入有氮化硅层52a。圆环部50d和圆环部50d所包含的可动部12与第一弹簧部20的中间部20c连接而被支承。
光学模块1B进一步包括控制部70。控制部70分别通过配线18、19与端子16、17电连接。端子16通过沟道16a与可动部12(即,第二叠层体50的多晶硅层51a)电绝缘,与固定部11(即,第一叠层体40的多晶硅层41c)电连接。端子17与可动部12(即,第二叠层体50的多晶硅层51a)电连接。控制部70与上述的第一实施方式一样,为了使静电致动器10驱动而检测固定部11与可动部12的间的静电电容,并根据其检测结果向固定部11与可动部12之间施加驱动电压。
在如以上那样构成的光学模块1B,当在图10的(a)所示的状态、通过控制部70对静电致动器10的固定部11与可动部12之间施加驱动电压时,在固定部11与可动部12之间产生与该驱动电压相应的静电力。由此,如图10(b)所示那样,可动部12沿驱动方向A(与半导体基板2的表面2a垂直的方向)被拉向固定部11。
另外,在第二实施方式中,驱动方向A和固定反射镜4与可动反射镜5相对的相对方向D一致。由于可动部12通过第一弹簧部20与可动反射镜5连接,因此可动反射镜5与可动部12的移动联动,相对于半导体基板2垂直地(即,向与半导体基板2的表面2a垂直的方向)驱动,调整可动反射镜5与固定反射镜4的间的距离。此处,由于可动反射镜5与具有比第一弹簧常数K1大的第二弹簧常数K2的第二弹簧部30也连接,因此移动得不如可动部12多。这样,在光学模块1B,相对于可动部12的移动距离,可动反射镜5的移动距离缩小。
而且,因为从法布里-珀罗干涉滤光器F透射的光的波长依赖于可动反射镜5与固定反射镜4的间的距离,所以能够通过调整施加于静电致动器10的驱动电压来适当地选择透射的光的波长。即,当被测定光L从外部射入时,具有与可动反射镜5与固定反射镜4之间的距离相应的波长的光被选择而向外部射出。此时,可动反射镜5与固定反射镜4之间的距离的调整能够一边通过控制部70测量静电致动器10的静电电容并监测可动部12的移动距离一边进行。由于可动部12的移动距离为将可动反射镜5的移动距离放大规定的倍率后的值,所以可动反射镜5的位置的控制精度稳定。
接着,对光学模块1B的制造方法的一个例子进行说明。首先,如图11(a)所示那样,在半导体基板2上依次形成氧化膜81和第一叠层体40。接着,如图11(b)所示那样,对第一叠层体40的多晶硅层41c进行图形化,形成沟道43。接着,如图12的(a)所示那样,作为牺牲层形成成为中间层82的氧化膜。接着,如图12的(b)所示那样,形成第二叠层体50的多晶硅层51a。接着,对多晶硅层51a进行图形化,形成沟道53。
接着,如图13(a)所示那样,形成第二叠层体50的剩余的层。接着,如图13(b)所示那样,利用干蚀刻将第二叠层体50部分地除去,形成可动反射镜5、第一弹簧部20、第二弹簧部30和静电致动器10的可动部12等各部并形成贯通孔50b。进一步,形成与端子16、17对应的固定部11和可动部12用的接触孔,进行电极金属的成膜。接着,利用氢氟酸气体,通过贯通孔50b进行气相蚀刻,将中间层82部分地除去,形成空隙S。
这样,利用表面微机械技术制造图8中所示的光学模块1B。另外,在作为第二弹簧部30的端部30b和外缘部50c的部分不形成贯通孔50b,由此能够进行将中间层82留下的调整。
在第二实施方式中,为了调整第一弹簧常数K1和第二弹簧常数K2的大小,对第一弹簧部20和第二弹簧部30的长度进行了调整,例如也可以通过在形成端子16、17时将电极金属蒸镀在第二弹簧部30来调整第一弹簧常数K1和第二弹簧常数K2的大小。此外,还能够通过对第一弹簧部20的多晶硅层51进行蚀刻而仅形成氮化硅层52等来改变第一弹簧部20和第二弹簧部30的层的材质和结构,从而调整第一弹簧常数K1和第二弹簧常数K2的大小。
如以上说明的那样,在光学模块1B,可动反射镜5与半导体基板2垂直地驱动。根据该结构,例如可动反射镜5向光学模块1B的外部露出,因此被测定光L容易射入可动反射镜5。进一步,能够优选运用使用表面微机械技术的制造方法。
此外,在光学模块1B,第一弹簧部20具有固定在半导体基板2的一端20a和成为与第二弹簧部30的连接部13的另一端20b,第二弹簧部30具有成为连接部13的一端30a和固定在半导体基板2的另一端30b。可动部12与第一弹簧部20的中间部20c连接。根据该结构,因为第一弹簧部20的一端被固定在半导体基板2,所以第一弹簧部20不易损伤。
以上,对本发明的实施方式进行了说明,本发明并不限定于上述各实施方式。例如,可动部的位置的检测也可以不通过固定部与可动部的间的静电电容的检测而通过利用激光干涉计等进行的位移测定来进行。根据该结构,不需要静电电容的检测。
此外,例如,光学部件也可以为构成法布里-珀罗干涉滤光器以外的干渉滤光器的反射镜等的部件。根据该结构,能够通过使该部件稳定且高精度地动作来提高该干渉滤光器的波长分辨率。此外,例如,在第二实施方式中,第一弹簧部20的一端20a也可以不固定在半导体基板2,而通过使得一端20a与可动部12连接来支承可动部12。根据该结构,能够将第一弹簧部20整体的伸长量作为可动部12的移动距离,容易将可动部12的移动距离放大。
在上述实施方式的光学模块的结构中,包括:半导体基板;静电致动器,其具有固定部和可动部,该固定部固定在半导体基板,该可动部通过在与固定部之间产生的静电力、相对于固定部移动;第一弹簧部,其与可动部连接,具有第一弹簧常数;第二弹簧部,其连接至第一弹簧部与半导体基板之间,具有比第一弹簧常数大的第二弹簧常数;和连接至第一弹簧部与第二弹簧部的连接部的光学部件。
上述结构的光学模块也可以进一步包括控制部,该控制部检测固定部与可动部的间的静电电容,并根据其检测结果向固定部与可动部之间施加驱动电压。根据该结构,能够通过静电电容检测静电致动器的可动部的位置,因此与施加电压的不稳定程度、周围温度的变化等无关,均能够使光学部件恰当地动作。
在上述结构的光学模块,光学部件也可以为法布里-珀罗干涉滤光器的可动反射镜。通过使可动反射镜稳定且高精度地动作,能够提高法布里-珀罗干涉滤光器的波长分辨率。
在上述结构的光学模块,可动部、第一弹簧部、第二弹簧部和光学部件在半导体基板一体地形成。根据该结构,例如能够通过对设置在半导体基板上的半导体层进行蚀刻,同时形成可动部、第一弹簧部、第二弹簧部和光学部件,因此能够将制造工序单纯化。
在上述结构的光学模块,也可以为如下结构:第一弹簧部包括并列设置的多个第一弹簧,第二弹簧部包括并列设置的多个第二弹簧。根据该结构,因为第一弹簧部和第二弹簧部分别包括多个弹簧,所以容易使得可动部和光学部件的支承稳定。
在上述结构的光学模块,光学部件也可以相对于半导体基板平行地驱动。根据该结构,容易放大可动部的可动范围。
在上述结构的光学模块,也可以为如下结构:第一弹簧部具有固定有可动部的一端和成为连接部的另一端,第二弹簧部具有成为连接部的一端和固定在半导体基板的另一端。根据该结构,能够将第一弹簧部整体的伸长量作为可动部的移动距离,因此容易将可动部的移动距离放大。
在上述结构的光学模块,光学部件也可以相对于半导体基板垂直地驱动。根据该结构,例如在光学部件为法布里-珀罗干涉滤光器的可动反射镜的情况下,容易使被测定光入射。
在上述结构的光学模块,第一弹簧部具有固定在半导体基板的一端和成为连接部的另一端,第二弹簧部具有成为连接部的一端和固定在半导体基板的另一端,可动部与第一弹簧部的中间部连接。根据该结构,因为第一弹簧部的一端被固定在半导体基板,所以第一弹簧部不易损伤。
工业上的可利用性
本发明能够作为能够使用静电致动器使光学部件稳定且高精度地动作的光学模块加以利用。
附图标记的说明
1A、1B光学模块
2半导体基板
3入射反射镜
4固定反射镜
5可动反射镜(光学部件)
6出射反射镜
8绝缘层
9半导体层
10 静电致动器
11 固定部
12 可动部
13 连接部
14、15支承部
16、17端子
18、19配线
20 第一弹簧部
20a一端
20b另一端
20c中间部
21、22、23、24第一弹簧
30 第二弹簧部
30a一端
30b另一端
31、32、33、34第二弹簧
40 第一叠层体
50 第二叠层体
81 氧化膜
82 中间层
70 控制部
F法布里-珀罗干涉滤光器
L被测定光
S空隙
光学模块专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。


















动态评分
0.0