







专利摘要
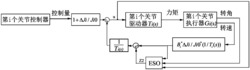
本发明公开一种基于改进PI结构的机器人柔性关节转换误差补偿方法,在对称Play算子的结构基础上,将Play算子中的线性部分用改进后的非线性Sigmoid函数替代,构造一个与迟滞曲线轮廓接近的新函数,得到非线性迟滞算子,以新迟滞算子为激励函数,构建神经网络迟滞模型,对柔性关节表现出的复杂迟滞特性进行建模,并基于该神经网络迟滞模型对柔性关节的驱动电机的进行控制补偿。本发明的神经网络迟滞模型具有在线学习能力,能够在线补偿工业机器人关节本身结构带来传递非线性误差,提高工业机器人关节执行的精度。
基于改进PI结构的机器人柔性关节转换误差补偿方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。











动态评分
0.0