







专利摘要
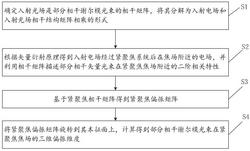
一种互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述互耦条件下双基地MIMO雷达角度估算方法包括如下步骤: S1、对接收阵列数据进行匹配滤波处理,并利用Tucker张量模型构建一个三阶张量模型;所述三阶张量模型如下: 式中,IK表述维数为K×K×K的单位张量, 表述噪声张量,B=[b1, b2,…,bL]T为目标特性矩阵, 与 分别表示受互耦影响的方向矩阵; S2、根据互耦矩阵的部分子矩阵的行元素具有循环移位特性构造去耦矩阵,对三阶张量模型进行去耦运算; S3、根据阵列方向矩阵中导引矢量的中心对称特性,构造前后平滑的数据张量,并经过酉变换获得实数张量; S4、对实数张量进行分解,构建去耦后数据的增广输出三线性模型,对三线性模型进行拟合,将联合DOD与DOA估计与三线性模型相联系; S5、通过最小二乘方法估计目标的DOD与DOA。 2.根据权利要求1所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S4中,采用TALS算法对三线性模型进行拟合。 3.根据权利要求1所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S2中的去耦矩阵如下: 式中0表示元素全为0的矩阵,I表示单位矩阵,下标均表示矩阵的维数; 4.根据权利要求3所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S2中的,对三阶张量模型进行去耦运算的表述如下: 式中 D=diag(dt)·diag (dr), 5.根据权利要求4所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S3中,构造前后平滑的数据张量: 式中,为相应的噪声张量, 表示维数为 的反向交换矩阵,其反对角线元素为1,其余元素为0,∪3表示将两个数据张量按照模-3方向进行堆叠。 6.根据权利要求5所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S3中,经过酉变换获得实数张量: 式中, Er为经过酉变换后的实值张量, 表述维数为 的酉变换矩。 7.根据权利要求6所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S4中,对实数张量进行分解,得到三线性分解模型的矩阵表达形式,其形式如下: 上式中, 和 E1=[Er]1,E2=[Er]2,E3=[Er]3。 8.根据权利要求7所述互耦条件下双基地MIMO雷达角度估算方法,其特征在于,所述步骤S3中,采用TALS算法对所述三线性模型进行拟合的分步骤如下: a)假设三个矩阵中的两个矩阵已知,采用LS的方法拟合其中的任何一个矩阵; b)采用LS的方法拟合剩下的两个矩阵; c)重复a)和b)直到迭代次数达到预设值或拟合误差达到预设阈值。
互耦条件下双基地MIMO雷达角度估算方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。













动态评分
0.0