

IPC分类号 : G06K9/00,G06K9/32,G06K9/40,G06K9/46,G06N3/12,G06T7/00








专利摘要
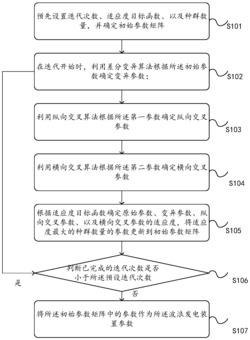
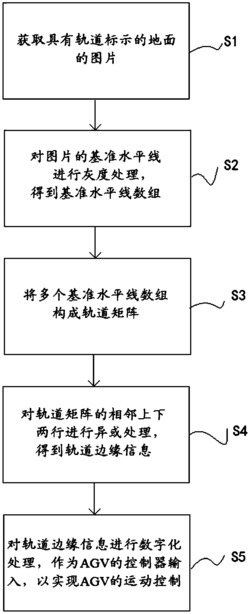
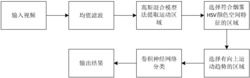
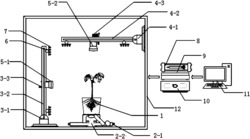
一种焊管焊缝实时检测视频的处理方法,其特征在于:其具体包括如下步骤: 1)、焊缝实时检测视频输入处理 将现有X射线检测装置中拍摄到的焊缝实时检测视频输入至计算机磁盘中; 2)、焊缝实时检测视频去噪处理; 2.1)从计算机磁盘中提取焊缝实时检测视频;随后对焊缝实时检测视频按照焊缝实时检测视频采集速率分解得到焊缝实时检测图像;将焊缝实时检测图像首先采用加权平均法做视频灰度处理和均值滤波处理得到灰度焊缝实时检测图像; 2.2)将灰度焊缝实时检测图像进行曲波正变换,将其视频数据分解成多个的子带,并得到各个子带上的曲波系数;具体过程如下: 曲波正变换通过将曲波基函数和目标函数做内积实现,引入两个窗函数,即半径窗E(α)和角度窗G(β)构建曲波基函数,其中α和β为极坐标位置,两者均满足容许条件: ‑j 定义 为曲波基函数,则其他2 尺度曲波基函数可以通过 的旋转和平移得 到旋转角度 ‑[j/2] θβ=2π*2 *l,l=0,1,2,...,0≤θβ≤2π, 2 平移参数k=(k1,k2)∈Z, ‑j 在尺度2 、方向θβ、位置 处的曲波基函数定义为: 其中Rθ为相对于弧度θ的旋转角度; 随后得到子带上的曲波系数为 2.3)随后利用广义交叉验证准则和遗传算法自适应选取各个子带曲波系数最优阈值,具体过程如下: 按照广义交叉验证准则定义如下目标函数: 最优阈值 其中,Kj,l为j尺度l方向上的阈值,Cj,l,k,n为j尺度l方向的曲波系数,Nj,l为j尺度l方向上曲波系数的个数,Nj,l,0为被置零的Cj,l,k,n的个数; 2.4)通过步骤2.3)中得到的最优阈值对步骤2.2)中得到的曲波系数进行阈值去噪,得到去噪曲波系数;而后将去噪曲波系数进行曲波反变换,重构得到去噪的钢管焊缝实时检测图像;3)、去噪的钢管焊缝实时检测图像的特征提取; 将去噪的钢管焊缝实时检测图像首先缩放至800*1333像素的固定大小;随后使用ResNet50网络模型以初始学习率为0.0025,低层次学习率为0.025的方式进行微调,做低层次特征提取,以确定裂纹、焊瘤、烧穿、弧坑、气泡、夹渣、咬边、未熔合和未焊透缺陷的特征; 同时,针对高层次特征增大感受野,以准确分类各种尺寸大小的缺陷;高层次特征增大感受野具体公式如下: 感受野 其中 是卷积层i的卷积核大小,stride(i)是i层的累积步长; 如此即可得到去噪的钢管焊缝实时检测图像的特征图; 4)、去噪的钢管焊缝实时检测图像的特征图的分析; 4.1)构建检测目标区域框 将800*1333的去噪的钢管焊缝实时检测图像的特征图变为(800/16)*(1333/16)再做 1*1卷积输出为(800/16)*(1333/16)*18;设定每个去噪的钢管焊缝实时检测图像的特征图有9个锚点;然后矩阵变换为(800/16)*(1333/16)*9*2的矩阵;通过softmax函数分类获得正向锚点,如此即初步提取了检测目标区域框; 4.2)检测目标区域框回归,得到修正后边界框; 检测目标区域框用(x,y,w,h)来表示,其中(x,y)表示边界框的中心位置,(w,h)表示边框的宽和高;在边界框回归时,使修正后的建议边界框和事实边界框尽量接进;公式如下: f(Px,Py,Pw,Ph)≈(Gx,Gy,Gw,Gh), 其中(Px,Py,Pw,Ph)是输入的建议区域P,(Gx,Gy,Gw,Gh)是事实边界框; (Px,Py,Pw,Ph)对边框的中心位置进行平移(Δx,Δy) Δx=Pwdx(P),Δy=Phdy(P) 修正后边界框中心位置为 修正后边界框宽和高为 损失函数: 其中i表示第i个锚点,pi表示softmax判断锚点属于正向的概率,t代表预测的边界框,Lcls表示softmax的损失值,Lreg表示soomth L1的损失值,Ncls和Nreg为常数,λ=Nreg/Ncls;最后依据获得的特征图和修正后边界框通过全连接层与softmax计算每个区域的缺陷类别,并根据损失函数每个区域的类别计算置信度; 5)、缺陷展示 通过增强现实的方式将步骤4)修正后边界框、缺陷类别和置信度加载RAX软件读取焊缝实时检测视频,如此加载在RAX软件中的焊缝实时检测视频中的裂纹、焊瘤、烧穿、弧坑、气泡、夹渣、咬边、未熔合和未焊透缺陷将被标记后展示在显示屏上。
一种焊管焊缝实时检测视频的处理方法专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。









动态评分
0.0