







专利摘要
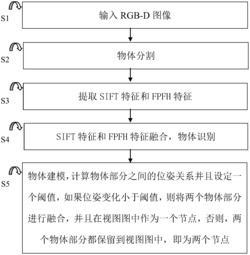
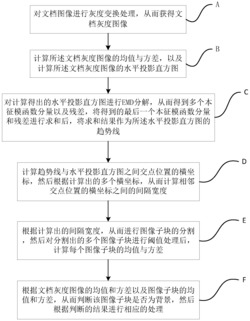
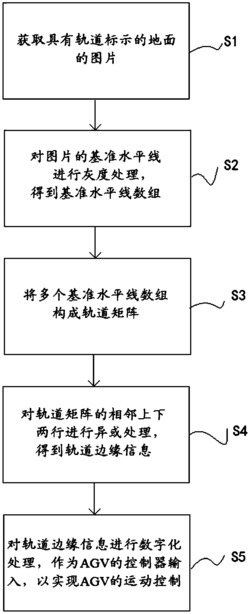
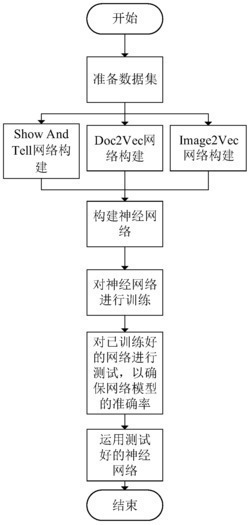
一种无人机智能船舶水尺识别方法,其特征在于,包括以下步骤: 通过无人机获取船舶水尺的原始图像; 利用船体与水面之间的色差,采用色域分割法分离所述原始图像中的船体和水面,得 到水线位置; 截取所述原始图像中水尺数字所在区域作为候选区,通过神经网络训练得到的数字识 别模型识别所述候选区中所有水尺数字; 根据所述水线位置与所述水尺数字的相对位置关系进行水尺识别; 利用船体与水面之间的色差,采用色域分割法分离所述原始图像中的船体和水面,得 到水线位置,具体为: 将所述原始图像转换为灰度图像,对所述灰度图像进行降噪处理,对降噪后的所述灰 度图像进行像素值遍历,得到第一水线位置; 将所述原始图像转换为HSV图像,取所述HSV图像中设定区域内的色素平均值作为锚, 利用所述锚在所述HSV图像中滑动寻找得到色素变化最大的变化区域,获取所述变化区域 的矢量,将矢量角度位于一定角度范围内变化区域剔除,然后依据长宽比例去挑选符合水 线特征的变化区域,以此判断得到第二水线位置; 根据所述第一水线位置以及所述第二水线位置拟合得到所述水线位置。 2.根据权利要求1所述的无人机智能船舶水尺识别方法,其特征在于,对所述灰度图像 进行降噪处理,具体为: 利用Canny算子对所述灰度图像进行降噪平滑处理; 对降噪平滑后的灰度图像进行膨胀腐蚀处理; 利用OpenCV中的findContours方法对膨胀腐蚀后的灰度图像进行进一步降噪处理,得 到降噪后的灰度图像。 3.根据权利要求1所述的无人机智能船舶水尺识别方法,其特征在于,截取所述原始图 像中水尺数字所在区域作为候选区,具体为: 对所述原始图像进行灰度处理得到灰度图像,采用最大稳定极值区域算法提取所述灰 度图像中的MSER区域; 对所述MSER区域进行降噪及去重处理得到所述候选区。 4.根据权利要求1所述的无人机智能船舶水尺识别方法,其特征在于,通过神经网络训 练得到的数字识别模型识别所述候选区中所有水尺数字,具体为: 收集水尺图像并进行预处理,建立样本数据集,对所述样本数据集中水尺图像进行数 字标注; 以标注后的水尺图像作为训练样本对神经网络进行训练得到水尺数字识别模型; 通过所述数字识别模型识别所述候选区中的水尺数字。 5.根据权利要求1所述的无人机智能船舶水尺识别方法,其特征在于,以标注后的水尺 图像作为训练样本对神经网络进行训练得到数字识别模型,还包括: 以谷歌街景门牌号码数据集对神经网络进行训练得到预训练模型; 以标注后的水尺图像对所述预训练模型进行训练得到所述数字识别模型。 6.根据权利要求1所述的无人机智能船舶水尺识别方法,其特征在于,根据所述水线位 置与所述水尺数字的相对位置关系进行水尺识别,具体为: 根据各所述水尺数字的像素相对位置关系进行拟合得到拟合曲线的曲率函数; 根据所述水线位置以及所述曲率函数确定所述水线在所述原始图像中的像素坐标; 获取所有水尺数字中位于最下方的各不同单位的水尺数字,得到单位水尺数字; 根据各单位数字与所述水线坐标的位置关系确定水位读数。 7.根据权利要求1所述的无人机智能船舶水尺识别方法,其特征在于,还包括: 通过无人机采集获取一段时间的船舶水尺的原始视频,从所述原始视频中截取多帧所 述原始图像; 分别基于每一帧所述原始图像进行水尺识别,得到相应的水位读数,筛选多个水位读 数的众数,并求取众数的平均值得到最后的水位读数。 8.一种无人机智能船舶水尺识别装置,其特征在于,包括处理器以及存储器,所述存储 器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现如权利要求1‑7任一所 述的无人机智能船舶水尺识别方法。 9.一种计算机存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理 器执行时,实现如权利要求1‑7任一所述的无人机智能船舶水尺识别方法。
一种无人机智能船舶水尺识别方法及装置专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0