

IPC分类号 : H04W4/33,H04W64/00,H04B10/116,H04B10/50,H04B10/516,H04B10/60





专利摘要
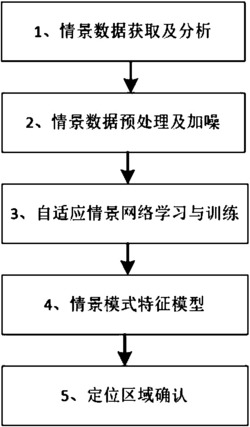
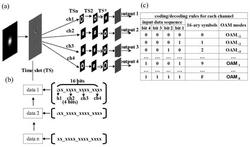
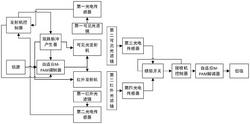
一种基于支持向量机回归的可见光定位方法,其特征在于,搭建可见光定位装置,所 述装置包括信号发送端和信号接收端,所述方法包括: S1、在信号发送端利用时分复用的方法对定位区域内的各个LED灯进行信号调制;所述 步骤S1具体包括: 选取n个LED参考点并进行编号,在LED信号发送端的驱动电路中加载不同时隙的周期 信号对发射信号进行调制,对发射信号进行调制的过程中,1帧信号被平均分隔为n+2个时 隙,n个LED灯全亮作为帧头,n个LED灯全灭作为帧尾,用数据k表示只让编号为k的LED点亮, 其他LED灭,其中k=1,2,3,…,n; S2、在信号接收端利用光电检测器在一个周期不同时间片段接收不同LED灯的信号,并 提取信号强度向量;所述步骤S2具体包括: 找到采样信号中信号强度最大值作为帧头,表示有效数据的开始,最小值作为帧尾,表 示有效数据的结束,并判断帧头和帧尾间是否有n个有效数据;若有效数据为n个,则帧头后 第k(k=1,2,3,…,n)个有效数据值减去帧尾数据值为 表示第k个LED灯照射到光电检 测器上的信号强度,最后得到光电检测器某位置(X,Y)处接收信号强度的向量 否则有效数据丢失,放弃本次数据处理,重复上述信号接收 及处理过程直到接收到一帧完整数据; S3、选取所述光电检测器训练位置,采集所述光电检测器不同位置坐标处接收到的信 号强度向量,并建立数据集; S4、根据所述数据集建立信号强度向量对应位置坐标的SVR训练模型; S5、将待测位置处接收到的信号强度向量输入所述SVR训练模型中,预测得到待测位置 坐标。 2.根据权利要求1所述一种基于支持向量机回归的可见光定位方法,其特征在于,所述 步骤S1中,所述信号发送端的LED灯至少三个。 3.根据权利要求1所述一种基于支持向量机回归的可见光定位方法,其特征在于,所述 步骤S2中,所述信号强度向量由LED灯编号及对应的单个LED灯信号强度组成。 4.根据权利要求1所述一种基于支持向量机回归的可见光定位方法,其特征在于,所述 步骤S4具体包括: 根据所述数据集构造训练集,对所述训练集进行归一化处理,选择径向基核函数RBF, 设置网格搜寻算法中惩罚因子和RBF核函数参数的寻优范围、步长和交叉验证次数,采用网 格搜寻算法搜索最佳惩罚因子和RBF核函数参数,根据所述训练集及所述最佳惩罚因子和 RBF核函数参数建立SVR训练模型。 5.根据权利要求4所述一种基于支持向量机回归的可见光定位方法,其特征在于,所述 采用网格搜寻算法搜索最佳惩罚因子和RBF核函数参数的具体过程为: 采用交叉验证计算出回归均方根误差,判断所述均方根误差的精度是否达到要求,若 所述均方根误差大于预设阈值,则缩小参数寻优范围和步长,重新搜索;若所述均方根误差 小于所述预设阈值,则以所述均方根误差最小值所对应的惩罚因子和RBF核函数参数为寻 优结果。 6.一种基于支持向量机回归的可见光定位系统,其特征在于,所述系统包括: 发射模块:用于利用时分复用的方法对定位区域内的各个LED灯的进行信号调制;所述 发射模块具体用于:选取n个LED参考点并进行编号,在LED信号发送端的驱动电路中加载不 同时隙的周期信号对发射信号进行调制,对发射信号进行调制的过程中,1帧信号被平均分 隔为n+2个时隙,n个LED灯全亮作为帧头,n个LED灯全灭作为帧尾,用数据k表示只让编号为 k的LED点亮,其他LED灭,其中k=1,2,3,…,n; 接收模块:用于利用光电检测器在一个周期不同时间片段接收不同LED灯的信号,并提 取信号强度向量;所述接收模块具体用于:找到采样信号中信号强度最大值作为帧头,表示 有效数据的开始,最小值作为帧尾,表示有效数据的结束,并判断帧头和帧尾间是否有n个 有效数据;若有效数据为n个,则帧头后第k(k=1,2,3,…,n)个有效数据值减去帧尾数据值 为 表示第k个LED灯照射到光电检测器上的信号强度,最后得到光电检测器某位置(X, Y)处接收信号强度的向量 否则有效数据丢失,放弃本次数据 处理,重复上述信号接收及处理过程直到接收到一帧完整数据; 采集模块:用于采集所述光电检测器在不同位置坐标处接收到的信号强度向量,并建 立数据集; 训练模块:用于根据所述数据集建立信号强度向量对应位置坐标的支持向量机回归 SVR训练模型; 预测模块:用于将待测位置处接收到的信号强度向量输入所述SVR训练模型中,预测得 到待测位置坐标。 7.根据权利要求6所述一种基于支持向量机回归的可见光定位系统,其特征在于,所述 训练模块具体包括: 预处理单元:根据所述数据集构造训练集,对所述训练集进行归一化处理; 设置单元:设置网格搜寻算法中惩罚因子和RBF核函数参数的寻优范围、步长和交叉验 证次数; 寻优单元:采用交叉验证计算出回归均方根误差,判断所述均方根误差是否达到要求, 若所述均方根误差大于预设阈值,则缩小参数寻优范围和步长,重新搜索;若所述均方根误 差小于所述预设阈值,则将所述均方根误差最小值所对应的惩罚因子和RBF核函数参数作 为寻优结果; 建模单元:根据所述数据集及所述惩罚因子和RBF核函数参数建立SVR训练模型。
一种基于支持向量机回归的可见光定位方法及系统专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0