









专利摘要
本发明公开了一种智能送餐机器人,包括机器人躯体、位于机器人躯体底部的移动底盘、位于机器人躯体内部并对送餐工作进行管理的PLC控制模块。移动底盘的两侧设有驱动机器人躯体移动的左驱动轮和右驱动轮,左驱动轮和右驱动轮分别与对应的左驱动电机和右驱动电机相连接。移动底盘的底部安装有两个感应地面磁导线的磁路传感器,PLC控制模块设有判断两个磁路传感器是否偏离地面磁导线的循迹模块,并通过左驱动电机和右驱动电机控制左驱动轮和右驱动轮沿地面磁导线移动到预定目的地。该智能送餐机器人能够实现自动循迹,精确停靠,使用起来方便,大大提高餐厅的运作效率。
权利要求
1.一种智能送餐机器人,包括机器人躯体(1)、位于机器人躯体(1)底部的移动底盘(2)、位于机器人躯体(1)内部并对送餐工作进行管理的PLC控制模块(3),其特征是:所述移动底盘(2)的两侧设有驱动机器人躯体(1)移动的左驱动轮(21)和右驱动轮(22),所述的左驱动轮(21)和右驱动轮(22)分别与对应的左驱动电机(23)和右驱动电机(24)相连接;所述移动底盘(2)的底部安装有两个感应地面磁导线的磁路传感器(25),所述的PLC控制模块(3)设有判断两个磁路传感器(25)是否偏离地面磁导线的循迹模块,并通过左驱动电机(23)和右驱动电机(24)控制左驱动轮(21)和右驱动轮(22)沿地面磁导线移动到预定目的地。
2.根据权利要求1所述的一种智能送餐机器人,其特征是:所述机器人躯体(1)的下方具有底座部(1a),所述的底座部(1a)具有安装移动底盘(2)的空腔;所述的移动底盘(2)设有与机器人躯体(1)固定连接的安装支架(26),所述的安装支架(26)通过减震弹簧(27)设置在移动底盘(2)上;在所述的安装支架(26)上固定有支撑杆(28),所述的支撑杆(28)与机器人躯体(1)的内部固定连接。
3.根据权利要求2所述的一种智能送餐机器人,其特征是:所述移动底盘(2)的底部设有用于保持机器人躯体(1)平衡的前万向平衡轮(41)和后万向平衡轮(42)。
4.根据权利要求3所述的一种智能送餐机器人,其特征是:所述的移动底盘(2)具有电池仓(29),所述的电池仓(29)内安装有为左驱动电机(23)、右驱动电机(24)和PLC控制模块(3)供电的蓄电池。
5.根据权利要求4所述的一种智能送餐机器人,其特征是:所述机器人躯体(1)的腰围(1b)处安装有一圈用于检测行进路程中是否有障碍物的红外传感器(5),所述的红外传感器(5)与PLC控制模块(3)相连接,所述的PLC控制模块(3)根据红外传感器(5)的检测信号控制左驱动电机(23)和右驱动电机(24)的启停。
6.根据权利要求5所述的一种智能送餐机器人,其特征是:所述的PLC控制模块(3)连接有语音模块(6);所述的语音模块(6)包括麦克输入模块(61)和音响输出模块(62),所述的PLC控制模块(3)接收到红外传感器(5)发送的障碍物信号后,通过音响输出模块(62)发出提示音。
7.根据权利要求6所述的一种智能送餐机器人,其特征是:所述的麦克输入模块(61)和音响输出模块(62)安装在机器人躯体(1)的头部(1e)。
8.根据权利要求7所述的一种智能送餐机器人,其特征是:所述机器人躯体(1)的手臂部(1c)安装有用于识别餐桌(9)上条码(91)是否正确的扫码器(7);所述的扫码器(7)与PLC控制模块(3)相连接。
9.根据权利要求8所述的一种智能送餐机器人,其特征是:所述机器人躯体(1)的胸口部(1d)安装有用于显示菜单及输入点餐命令的触摸显示屏(8);所述的PLC控制模块(3)设有将点餐命令传输到控制台的无线连接模块(31)。
10.根据权利要求9所述的一种智能送餐机器人,其特征是:所述的机器人躯体(1)具有玻璃钢构成的外壳层。
说明书
技术领域
本发明涉及一种机器人,具体地说是用于餐厅的一种智能送餐机器人。
背景技术
餐饮行业跑菜送菜人力需求大,而且技术含量低、工作收入低经常无人问津。中国饭店协会会长韩明在《2015年中国餐饮业的新趋势》的主题报告中透露,从协会调查的重点餐饮企业情况看,今年的利润率较上年同期大多有不同幅度下降,降幅平均达到近10%,主要是由于租金、人工成本的上涨远超过了营收的增长幅度。以上海为例,2013年上海餐饮企业平均利润率在3%至5%,今年上半年平均不足2.5%。而同期上海餐饮业的人力成本上涨了15%至20%,租金平均上涨了10%左右。
在人力成本不断上涨的背景下,用智能送餐机器人实现自动化的送餐服务就成了餐饮行业的需求。以送餐机器人为例,每台造价6万元,寿命为5年。折算下来,一个送餐机器人一年的费用是1.2万多元。如果换成一个服务员,年薪就要三、四万,因此使用送餐机器人可以大大降低人力成本,并提高餐厅运作效率。
发明内容
本发明所要解决的技术问题是针对上述现有技术现状,而提供一种智能送餐机器人,实现智能化、自动化的送餐作业。
本发明解决上述技术问题所采用的技术方案为:一种智能送餐机器人,包括机器人躯体、位于机器人躯体底部的移动底盘、位于机器人躯体内部并对送餐工作进行管理的PLC控制模块。移动底盘的两侧设有驱动机器人躯体移动的左驱动轮和右驱动轮,左驱动轮和右驱动轮分别与对应的左驱动电机和右驱动电机相连接。移动底盘的底部安装有两个感应地面磁导线的磁路传感器,PLC控制模块设有判断两个磁路传感器是否偏离地面磁导线的循迹模块,并通过左驱动电机和右驱动电机控制左驱动轮和右驱动轮沿地面磁导线移动到预定目的地。
为优化上述技术方案,本发明还包括以下改进的技术方案。
上述机器人躯体的下方具有底座部,底座部具有安装移动底盘的空腔。移动底盘设有与机器人躯体固定连接的安装支架,安装支架通过减震弹簧设置在移动底盘上。在安装支架上固定有支撑杆,支撑杆与机器人躯体的内部固定连接。
上述移动底盘的底部设有用于保持机器人躯体平衡的前万向平衡轮和后万向平衡轮。
上述的移动底盘具有电池仓,电池仓内安装有为左驱动电机、右驱动电机和PLC控制模块供电的蓄电池。
上述机器人躯体的腰围处安装有一圈用于检测行进路程中是否有障碍物的红外传感器,红外传感器与PLC控制模块相连接,PLC控制模块根据红外传感器的检测信号控制左驱动电机和右驱动电机的启停。
上述的PLC控制模块连接有语音模块。语音模块包括麦克输入模块和音响输出模块,PLC控制模块接收到红外传感器发送的障碍物信号后,通过音响输出模块发出提示音。
上述的麦克输入模块和音响输出模块安装在机器人躯体的头部。
上述机器人躯体的手臂部安装有用于识别餐桌上条码是否正确的扫码器。扫码器与PLC控制模块相连接。
上述机器人躯体的胸口部安装有用于显示菜单及输入点餐命令的触摸显示屏。PLC控制模块设有将点餐命令传输到控制台的无线连接模块。
上述的机器人躯体具有玻璃钢构成的外壳层。
与现有技术相比,本发明的智能送餐机器人根据移动底盘底部的两个磁路传感器感应地面磁导线的方向,PLC控制模块中的循迹模块可以根据两个磁路传感器的感应信号判断偏离角度,从而及时调整左驱动电机和右驱动电机的转速使智能送餐机器人返回设定路线,保证智能送餐机器人始终根据地面磁导线的轨迹行走。在智能送餐机器人到达餐桌位置时,可以通过扫码器核对餐桌信息,并发出语音提示,顾客根据提示可取餐或者回收空盘子。本发明的智能送餐机器人能够实现自动循迹,精确停靠,使用起来简单方便,大大提高餐厅的运作效率。
附图说明
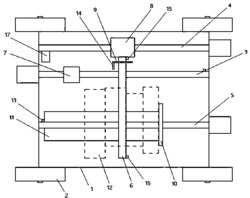
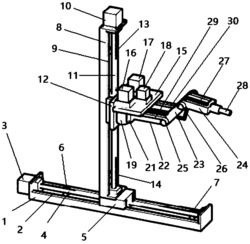
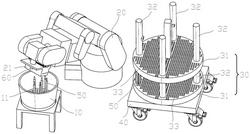
图1是本实施例的立体结构示意图。
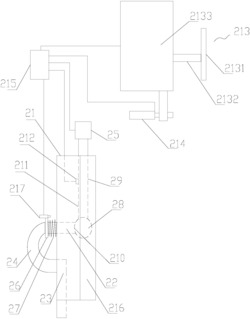
图2是本实施例中移动底盘的侧面结构示意图。
图3是本实施例中移动底盘的俯视结构示意图。
图4是本实施例的模块结构示意图。
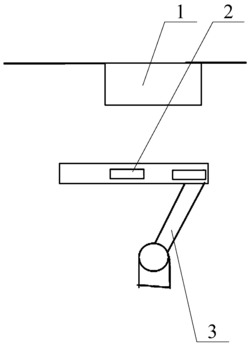
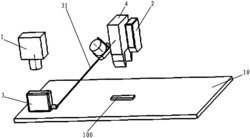
图5是本实施例的运行示意图。
具体实施方式
以下结合附图对本发明的实施例作进一步详细描述。
图1至图5所示为本发明的结构示意图。
其中的附图标记为:机器人躯体1、底座部1a、腰围1b、手臂部1c、胸口部1d、头部1e、移动底盘2、左驱动轮21、右驱动轮22、左驱动电机23、右驱动电机24、磁路传感器25、安装支架26、减震弹簧27、支撑杆28、电池仓29、PLC控制模块3、无线连接模块31、前万向平衡轮41、后万向平衡轮42、红外传感器5、语音模块6、麦克输入模块61、音响输出模块62、扫码器7、触摸显示屏8、餐桌9、条码91。
本发明的一种智能送餐机器人,包括机器人躯体1、位于机器人躯体1底部的移动底盘2、位于机器人躯体1内部并对送餐工作进行管理的PLC控制模块3。
在移动底盘2的两侧设有驱动机器人躯体1移动的左驱动轮21和右驱动轮22,左驱动轮21和右驱动轮22分别与对应的左驱动电机23和右驱动电机24相连接。
移动底盘2的底部安装有两个感应地面磁导线的磁路传感器25,PLC控制模块3设有判断两个磁路传感器25是否偏离地面磁导线的循迹模块,并通过左驱动电机23和右驱动电机24控制左驱动轮21和右驱动轮22沿地面磁导线移动到预定目的地。
本发明中,两个磁路传感器25前后向安装在移动底盘2的底部,当智能送餐机器人沿地面磁导线行进时,两个磁路传感器25都能感应到磁导线信号。若智能送餐机器人偏离磁导线,PLC控制模块3中的循迹模块根据两个磁路传感器25检测到的信号计算偏转角度,及时控制左驱动电机23和右驱动电机24工作,使智能送餐机器人始终沿地面磁导线行进。
本发明中的左驱动电机23和右驱动电机24可以是步进电机,也可以伺服电机,由PLC控制模块3控制转动速度,可以实现直线和转向移动。
机器人躯体1的下方具有底座部1a,底座部1a具有安装移动底盘2的空腔。移动底盘2设有与机器人躯体1固定连接的安装支架26,安装支架26通过减震弹簧27设置在移动底盘2上。在安装支架26上固定有支撑杆28,支撑杆28与机器人躯体1的内部固定连接。
移动底盘2的底部设有用于保持机器人躯体1平衡的前万向平衡轮41和后万向平衡轮42。左驱动轮21和右驱动轮22控制智能送餐机器人的前进、倒退和转向,前万向平衡轮41和后万向平衡轮42可以随着智能送餐机器人的移动而随动,保证智能送餐机器人的平衡。
移动底盘2具有电池仓29,电池仓29内安装有为左驱动电机23、右驱动电机24和PLC控制模块3供电的蓄电池。蓄电池设置在移动底盘2上,可以降低智能送餐机器人的重心,保证运行的稳定性。
机器人躯体1的腰围1b处安装有一圈用于检测行进路程中是否有障碍物的红外传感器5,红外传感器5与PLC控制模块3相连接,PLC控制模块3根据红外传感器5的检测信号控制左驱动电机23和右驱动电机24的启停。
PLC控制模块3连接有语音模块6。语音模块6包括麦克输入模块61和音响输出模块62,PLC控制模块3接收到红外传感器5发送的障碍物信号后,通过音响输出模块62发出提示音。
麦克输入模块61和音响输出模块62安装在机器人躯体1的头部1e。在优选实施例中,麦克输入模块61可以设置在头部1e的耳朵处,接受语音命令。音响输出模块62设置在头部1e的前端,并可以设置相应的灯光提示。当红外传感器5检测到路线前方有人时,PLC控制模块3先控制左驱动电机23和右驱动电机24停止,并通过音响输出模块62播放提示语音,等人员离开前进路线后便可以继续前进。
机器人躯体1的手臂部1c安装有用于识别餐桌9上的条码91是否正确的扫码器7。扫码器7与PLC控制模块3相连接。
如图5所示,餐厅中的餐桌9按序排列,并在地上铺设地面磁导线,使各个餐桌9和厨房连接。当智能送餐机器人移动到餐桌9位置时,机器人自动停止运动,并且手臂部1c安装的扫码器7可以识别餐桌9上的条码91,以检验是否正确送餐。如果正确送餐,则语音模块6通过音响输出模块62输出提示语音,方便用户进行取餐或者回收空盘子。如果条码91识别错误,则重新计算送餐路径。
机器人躯体1的胸口部1d安装有用于显示菜单及输入点餐命令的触摸显示屏8。PLC控制模块3设有将点餐命令传输到控制台的无线连接模块31。用户坐到餐桌9后,智能送餐机器人可以移动到餐桌9前,方便客人通过触摸显示屏8点餐。点餐完成后,点餐命令通过无线连接模块31发送到后台,以便厨房根据点餐命令制作饭菜。
机器人躯体1具有玻璃钢构成的外壳层,具有美观坚固的优点,防止因碰撞而损坏。
本发明的最佳实施例已阐明,由本领域普通技术人员做出的各种变化或改型都不会脱离本发明的范围。
一种智能送餐机器人专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。












动态评分
0.0