









专利摘要
本发明公开了一种机器人躯干与底盘的安装结构,其结构包括转动支撑轴、电源接触控制装置、接触装置支撑架、支撑架固定块、转动支撑盘、转动定位架、定位架固定头、电动机接电箱、电动机接电箱连接架、主机底座,主机底座的上部设有转动支撑轴,转动支撑轴为圆柱体结构,转动支撑轴的上部设有转动支撑盘,转动支撑盘为圆形结构,转动支撑盘的右部设有支撑架固定块,可以有效的提高了设备的工作的稳定性和可靠性,当电源连接线接触不良或者没有插到底时自动断开,有效的提高了设备的使用的安全性和可靠性。
权利要求
1.一种机器人躯干与底盘的安装结构,其结构包括转动支撑轴(1)、电源接触控制装置(2)、接触装置支撑架(3)、支撑架固定块(4)、转动支撑盘(5)、转动定位架(6)、定位架固定头(7)、电动机接电箱(8)、电动机接电箱连接架(9)、主机底座(10),其特征在于: 所述主机底座(10)的上部设有转动支撑轴(1),所述转动支撑轴(1)为圆柱体结构,所述转动支撑轴(1)的上部设有转动支撑盘(5),所述转动支撑盘(5)为圆形结构,所述转动支撑盘(5)的右部设有支撑架固定块(4),所述支撑架固定块(4)通过螺栓与转动支撑盘(5)固定连接,所述支撑架固定块(4)的后部设有接触装置支撑架(3),所述接触装置支撑架(3)通过焊接与支撑架固定块(4)固定连接,所述接触装置支撑架(3)通过卡槽与转动支撑盘(5)配合,所述接触装置支撑架(3)的上部设有电源接触控制装置(2),所述电源接触控制装置(2)的外壳与接触装置支撑架(3)为一体化结构,所述转动支撑盘(5)的中部设有转动定位架(6),所述转动定位架(6)穿过主机底座(10)与外部的动力设备连接,所述转动定位架(6)的上部设有定位架固定头(7),所述定位架固定头(7)通过螺栓和卡扣与转动定位架(6)固定,所述转动支撑轴(1)的左部设有电动机接电箱连接架(9),所述电动机接电箱连接架(9)为空心结构,所述电动机接电箱连接架(9)的截面为矩形结构,所述电动机接电箱连接架(9)的左部与电动机接电箱(8)固定连接,所述电动机接电箱(8)的左部设有接电接口,所述转动支撑轴(1)的底部与主机底座(10)固定连接,所述主机底座(10)通过焊接与转动支撑轴(1)固定,所述转动支撑轴(1)的左部通过焊接与电动机接电箱连接架(9)连接; 所述电源接触控制装置(2)包括接触检测器(21)、电信号转换装置(22)、前部传动装置(23)、卡紧状态显示灯(24)、中部传动系统(25)、传动齿轮组(26)、电源开关控制装置(27)、外部固定头(28)、电源接触控制外壳(29)、电源连接线接口(210),所述电源接触控制外壳(29)的上部的右部设有电源连接线接口(210),所述电源连接线接口(210)为矩形结构,所述电源连接线接口(210)的内部的最里面设有接触检测器(21)和电源接触金手指,所述接触检测器(21)通过电源连接线与电信号转换装置(22)连接,所述电信号转换装置(22)的下部通过活动连接杆与前部传动装置(23)连接,所述前部传动装置(23)通过齿轮与中部传动系统(25)的传动轮连接,所述中部传动系统(25)的输出端通过皮带与传动齿轮组(26)连接,所述传动齿轮组(26)的输出端与电源开关控制装置(27)配合,所述电源开关控制装置(27)固定设在电源接触控制外壳(29)的右下部,所述电源接触控制外壳(29)的各个部件通过螺栓与电源接触控制外壳(29)固定连接,所述电源连接线接口(210)的下部设有卡紧状态显示灯(24)。
2.根据权利要求1所述的一种机器人躯干与底盘的安装结构,其特征在于:所述接触检测器(21)包括活动接触头(211)、输出接触金属头(212)、主电源连接线(213)、输入接触金属头(214),所述活动接触头(211)通过定位架与电源连接线接口(210)配合,所述活动接触头(211)的左端与输出接触金属头(212)固定连接,所述输出接触金属头(212)与输入接触金属头(214)配合,所述输入接触金属头(214)通过电源连接线与电信号转换装置(22)连接,所述主电源连接线(213)与电源开关控制装置(27)串联。
3.根据权利要求1所述的一种机器人躯干与底盘的安装结构,其特征在于:所述电信号转换装置(22)包括电流感应线圈(221)、杠杆支撑架(222)、杠杆复位弹簧(223)、杠杆主体(224)、感应磁铁(225),所述电流感应线圈(221)设在电信号转换装置(22)的底座上,所述电流感应线圈(221)的下方设有杠杆支撑架(222),所述杠杆支撑架(222)的下方设有杠杆复位弹簧(223),所述杠杆复位弹簧(223)的右端与杠杆主体(224)连接,所述杠杆主体(224)的中部与杠杆支撑架(222)连接,所述杠杆支撑架(222)通过轴承与杠杆主体(224)活动连接,所述电流感应线圈(221)与感应磁铁(225)配合,所述感应磁铁(225)通过胶水与杠杆主体(224)固定连接。
4.根据权利要求3所述的一种机器人躯干与底盘的安装结构,其特征在于:所述前部传动装置(23)包括活动连接杆(231)、水平运动滑块(232)、水平运动滑轨(233)、输出半齿轮(234),所述杠杆主体(224)与活动连接杆(231)活动连接,所述活动连接杆(231)与水平运动滑块(232)连接,所述水平运动滑块(232)的下部与水平运动滑轨(233)配合,所述水平运动滑块(232)上部的连接齿与输出半齿轮(234)配合。
5.根据权利要求1所述的一种机器人躯干与底盘的安装结构,其特征在于:所述卡紧状态显示灯(24)包括卡紧检测弹片(241)、卡紧检测输出连接杆(242)、电源连接头(243)、LED电源灯(244),所述卡紧检测弹片(241)通过连接线与卡紧检测输出连接杆(242)配合,所述卡紧检测输出连接杆(242)与电源连接头(243)连接,所述电源连接头(243)的右边设有LED电源灯(244)。
6.根据权利要求4所述的一种机器人躯干与底盘的安装结构,其特征在于:所述中部传动系统(25)包括动力输入齿轮(251)、第一传动轮(252)、传动杆输入辊(253)、传动轴(254)、传动轴输出连接皮带(255),所述动力输入齿轮(251)与输出半齿轮(234)配合,所述动力输入齿轮(251)通过连接线与第一传动轮(252)连接,所述第一传动轮(252)的输出连接线与传动杆输入辊(253)配合,所述传动杆输入辊(253)设在传动轴(254)的右端,所述传动轴(254)的左部的输出辊通过传动轴输出连接皮带(255)与传动齿轮组(26)连接。
7.根据权利要求1所述的一种机器人躯干与底盘的安装结构,其特征在于:所述传动齿轮组(26)包括底部支撑底座(261)、收线辊(262)、输入转动齿轮(263)、输出转动齿轮(264)、输出转动齿轮支架(265)、传动齿轮输出连接线(266),所述底部支撑底座(261)通过螺栓与电源接触控制外壳(29)固定连接,所述底部支撑底座(261)的上部设有收线辊(262),所述收线辊(262)通过轴承与底部支撑底座(261)活动连接,所述收线辊(262)的上部固定设有输入转动齿轮(263),所述输入转动齿轮(263)的上部设有输出转动齿轮(264),所述输出转动齿轮(264)与输入转动齿轮(263)啮合,所述输出转动齿轮(264)的中部设有皮带连接辊与传动齿轮输出连接线(266)配合,所述输出转动齿轮(264)通过轴承与输出转动齿轮支架(265)固定连接。
8.根据权利要求1所述的一种机器人躯干与底盘的安装结构,其特征在于:所述电源开关控制装置(27)包括输出连接传动轮组(271)、电源接触滑块(272)、控制电源接触头(273)、控制电源输出连接线(274)、电动推杆(275)、电源连通片(276)、固定电源连接线(277),所述输出连接传动轮组(271)与电源接触滑块(272)连接,所述电源接触滑块(272)上设有控制电源接触头(273),所述控制电源接触头(273)通过控制电源输出连接线(274)与电动推杆(275)连接,所述电动推杆(275)的输出杆上设有电源连通片(276),所述电源连通片(276)与固定电源连接线(277)配合。
说明书
技术领域
本发明是一种机器人躯干与底盘的安装结构,属于机器人领域。
背景技术
机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。它是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。国际上对机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。
但是,现有设备工作时,电源连接线在工作的过程中容易脱落,可能会导致设备突然断电损坏设备。
发明内容
针对现有技术存在的不足,本发明目的是提供一种机器人躯干与底盘的安装结构,以解决现有设备工作时,电源连接线在工作的过程中容易脱落,可能会导致设备突然断电损坏设备。
为了实现上述目的,本发明是通过如下的技术方案来实现:一种机器人躯干与底盘的安装结构,其结构包括转动支撑轴、电源接触控制装置、接触装置支撑架、支撑架固定块、转动支撑盘、转动定位架、定位架固定头、电动机接电箱、电动机接电箱连接架、主机底座,所述主机底座的上部设有转动支撑轴,所述转动支撑轴为圆柱体结构,所述转动支撑轴的上部设有转动支撑盘,所述转动支撑盘为圆形结构,所述转动支撑盘的右部设有支撑架固定块,所述支撑架固定块通过螺栓与转动支撑盘固定连接,所述支撑架固定块的后部设有接触装置支撑架,所述接触装置支撑架通过焊接与支撑架固定块固定连接,所述接触装置支撑架通过卡槽与转动支撑盘配合,所述接触装置支撑架的上部设有电源接触控制装置,所述电源接触控制装置的外壳与接触装置支撑架为一体化结构,所述转动支撑盘的中部设有转动定位架,所述转动定位架穿过主机底座与外部的动力设备连接,所述转动定位架的上部设有定位架固定头,所述定位架固定头通过螺栓和卡扣与转动定位架固定,所述转动支撑轴的左部设有电动机接电箱连接架,所述电动机接电箱连接架为空心结构,所述电动机接电箱连接架的截面为矩形结构,所述电动机接电箱连接架的左部与电动机接电箱固定连接,所述电动机接电箱的左部设有接电接口,所述转动支撑轴的底部与主机底座固定连接,所述主机底座通过焊接与转动支撑轴固定,所述转动支撑轴的左部通过焊接与电动机接电箱连接架连接,所述电源接触控制装置包括接触检测器、电信号转换装置、前部传动装置、卡紧状态显示灯、中部传动系统、传动齿轮组、电源开关控制装置、外部固定头、电源接触控制外壳、电源连接线接口,所述电源接触控制外壳的上部的右部设有电源连接线接口,所述电源连接线接口为矩形结构,所述电源连接线接口的内部的最里面设有接触检测器和电源接触金手指,所述接触检测器通过电源连接线与电信号转换装置连接,所述电信号转换装置的下部通过活动连接杆与前部传动装置连接,所述前部传动装置通过齿轮与中部传动系统的传动轮连接,所述中部传动系统的输出端通过皮带与传动齿轮组连接,所述传动齿轮组的输出端与电源开关控制装置配合,所述电源开关控制装置固定设在电源接触控制外壳的右下部,所述电源接触控制外壳的各个部件通过螺栓与电源接触控制外壳固定连接,所述电源连接线接口的下部设有卡紧状态显示灯。
进一步的,所述接触检测器包括活动接触头、输出接触金属头、主电源连接线、输入接触金属头,所述活动接触头通过定位架与电源连接线接口配合,所述活动接触头的左端与输出接触金属头固定连接,所述输出接触金属头与输入接触金属头配合,所述输入接触金属头通过电源连接线与电信号转换装置连接,所述主电源连接线与电源开关控制装置串联。
进一步的,所述电信号转换装置包括电流感应线圈、杠杆支撑架、杠杆复位弹簧、杠杆主体、感应磁铁,所述电流感应线圈设在电信号转换装置的底座上,所述电流感应线圈的下方设有杠杆支撑架,所述杠杆支撑架的下方设有杠杆复位弹簧,所述杠杆复位弹簧的右端与杠杆主体连接,所述杠杆主体的中部与杠杆支撑架连接,所述杠杆支撑架通过轴承与杠杆主体活动连接,所述电流感应线圈与感应磁铁配合,所述感应磁铁通过胶水与杠杆主体固定连接。
进一步的,所述前部传动装置包括活动连接杆、水平运动滑块、水平运动滑轨、输出半齿轮,所述杠杆主体与活动连接杆活动连接,所述活动连接杆与水平运动滑块连接,所述水平运动滑块的下部与水平运动滑轨配合,所述水平运动滑块上部的连接齿与输出半齿轮配合。
进一步的,所述卡紧状态显示灯包括卡紧检测弹片、卡紧检测输出连接杆、电源连接头、LED电源灯,所述卡紧检测弹片通过连接线与卡紧检测输出连接杆配合,所述卡紧检测输出连接杆与电源连接头连接,所述电源连接头的右边设有LED电源灯。
进一步的,所述中部传动系统包括动力输入齿轮、第一传动轮、传动杆输入辊、传动轴、传动轴输出连接皮带,所述动力输入齿轮与输出半齿轮配合,所述动力输入齿轮通过连接线与第一传动轮连接,所述第一传动轮的输出连接线与传动杆输入辊配合,所述传动杆输入辊设在传动轴的右端,所述传动轴的左部的输出辊通过传动轴输出连接皮带与传动齿轮组连接。
进一步的,所述传动齿轮组包括底部支撑底座、收线辊、输入转动齿轮、输出转动齿轮、输出转动齿轮支架、传动齿轮输出连接线,所述底部支撑底座通过螺栓与电源接触控制外壳固定连接,所述底部支撑底座的上部设有收线辊,所述收线辊通过轴承与底部支撑底座活动连接,所述收线辊的上部固定设有输入转动齿轮,所述输入转动齿轮的上部设有输出转动齿轮,所述输出转动齿轮与输入转动齿轮啮合,所述输出转动齿轮的中部设有皮带连接辊与传动齿轮输出连接线配合,所述输出转动齿轮通过轴承与输出转动齿轮支架固定连接。
进一步的,所述电源开关控制装置包括输出连接传动轮组、电源接触滑块、控制电源接触头、控制电源输出连接线、电动推杆、电源连通片、固定电源连接线,所述输出连接传动轮组与电源接触滑块连接,所述电源接触滑块上设有控制电源接触头,所述固定的控制电源接触头通过控制电源输出连接线与电动推杆连接,所述电动推杆的输出杆上设有电源连通片,所述电源连通片与固定电源连接线配合。
有益效果
本发明提供一种机器人躯干与底盘的安装结构的方案,设有电源接触控制装置,设备在正常安装时,将主机底座使用螺栓固定在支架上,之后将转动定位架的底部与转动控制电机连接,然后将电源接触控制装置与电源连接线连接,之后将插头插入电源连接线接口的内部,插头插入时,会将活动接触头向左推,从而使输出接触金属头与输入接触金属头接触,连通电源,电流从连接线流至电流感应线圈,电流感应线圈产生磁场将杠杆主体、感应磁铁向左吸引,从而杠杆主体克服杠杆复位弹簧的阻力逆时针转动从而将活动连接杆、水平运动滑块向右推,活动连接杆、水平运动滑块向右运动时带动输出半齿轮逆时针转动,当转动到一定的角度时可以带动动力输入齿轮转动,之后动力输入齿轮通过连接线带动第一传动轮、传动杆输入辊转动,第一传动轮、传动杆输入辊转动时会带动传动轴、传动轴输出连接皮带一起转动,从而带动收线辊、输入转动齿轮转动,收线辊、输入转动齿轮转动时带动输出转动齿轮转动,输出转动齿轮通过连接线带动输出连接传动轮组转动,从而带动电源接触滑块向上运动使控制电源接触头接触,连通电动推杆的电源,电动推杆开始工作将电源连通片向上推,当电源连通片与固定电源连接线接触时,整个电路的电源连通,可以有效的提高了设备的工作的稳定性和可靠性,当电源连接线接触不良或者没有插到底时自动断开,有效的提高了设备的使用的安全性和可靠性。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
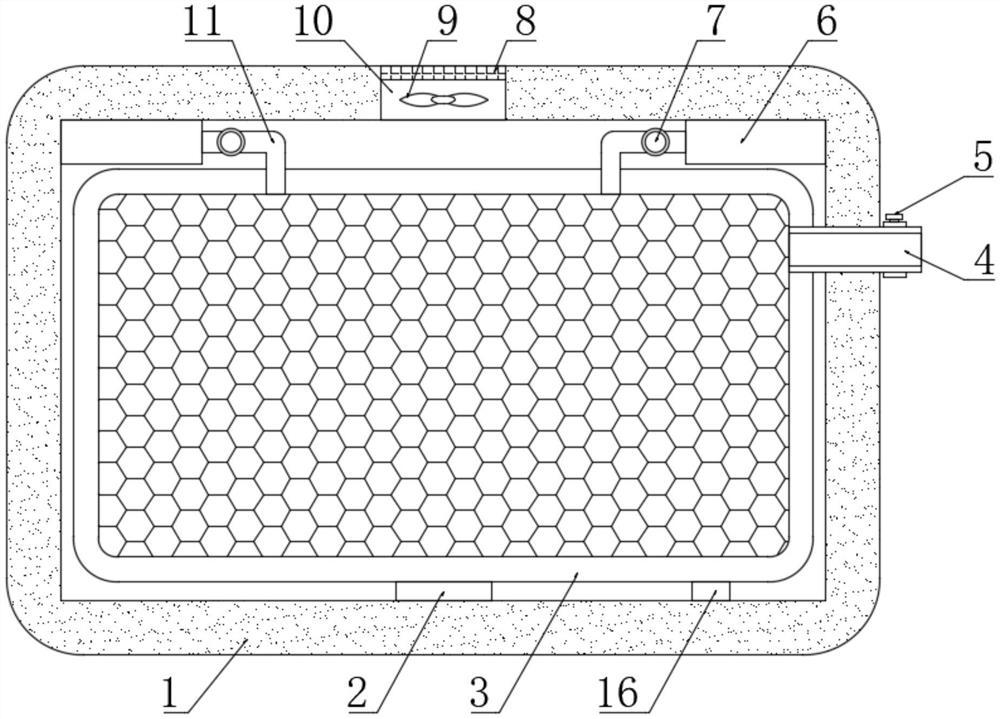
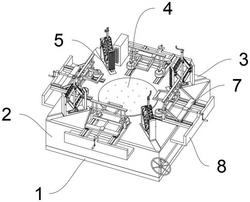
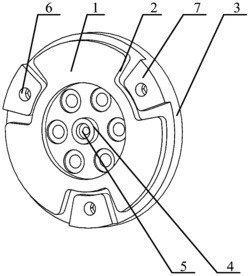
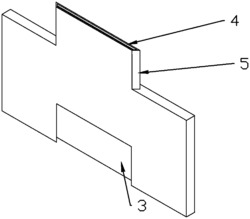
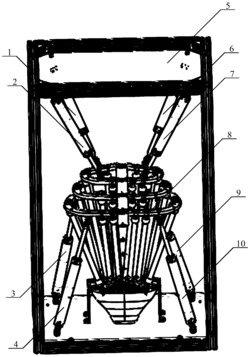
图1为本发明一种机器人躯干与底盘的安装结构的结构示意图。
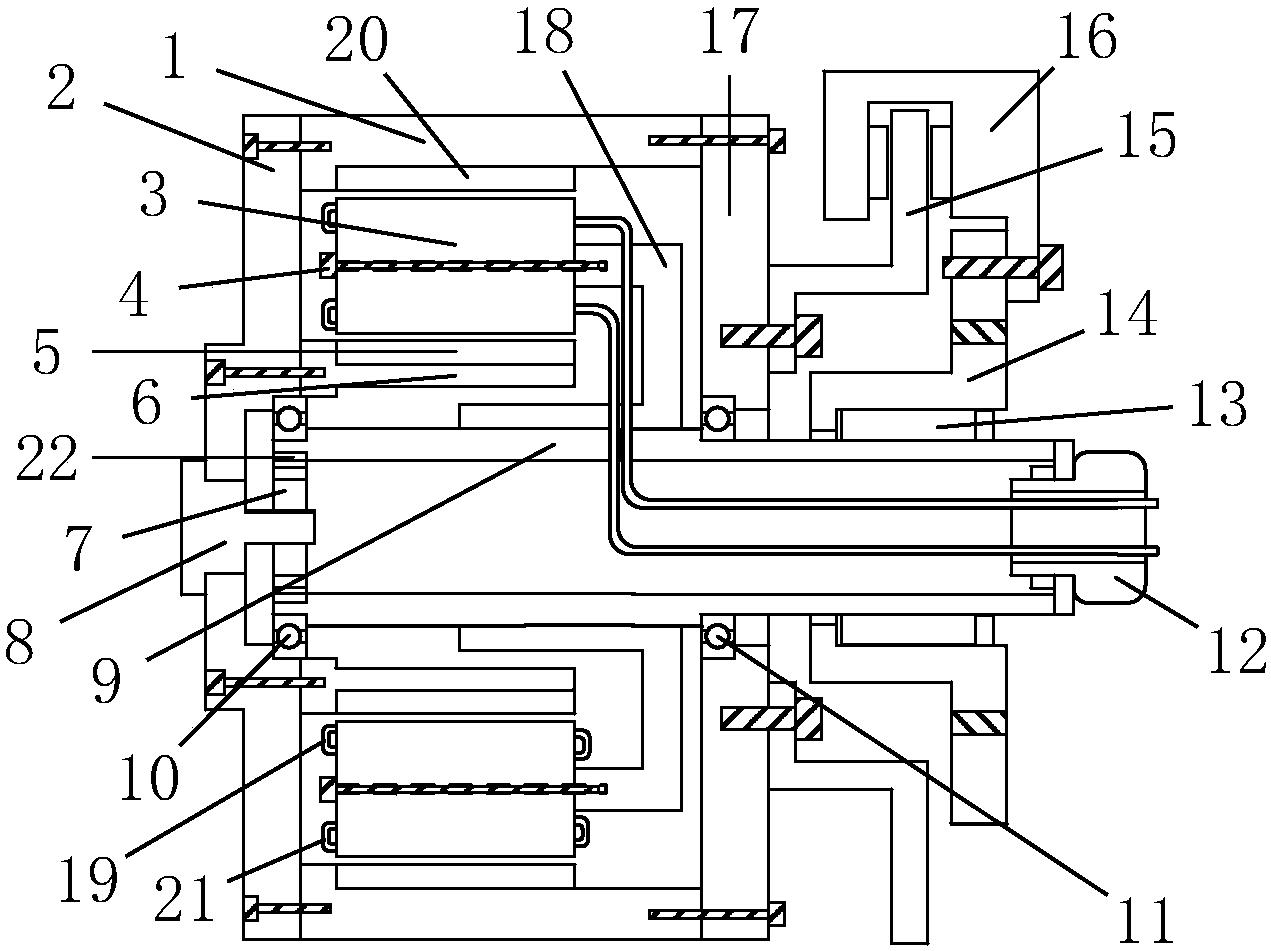
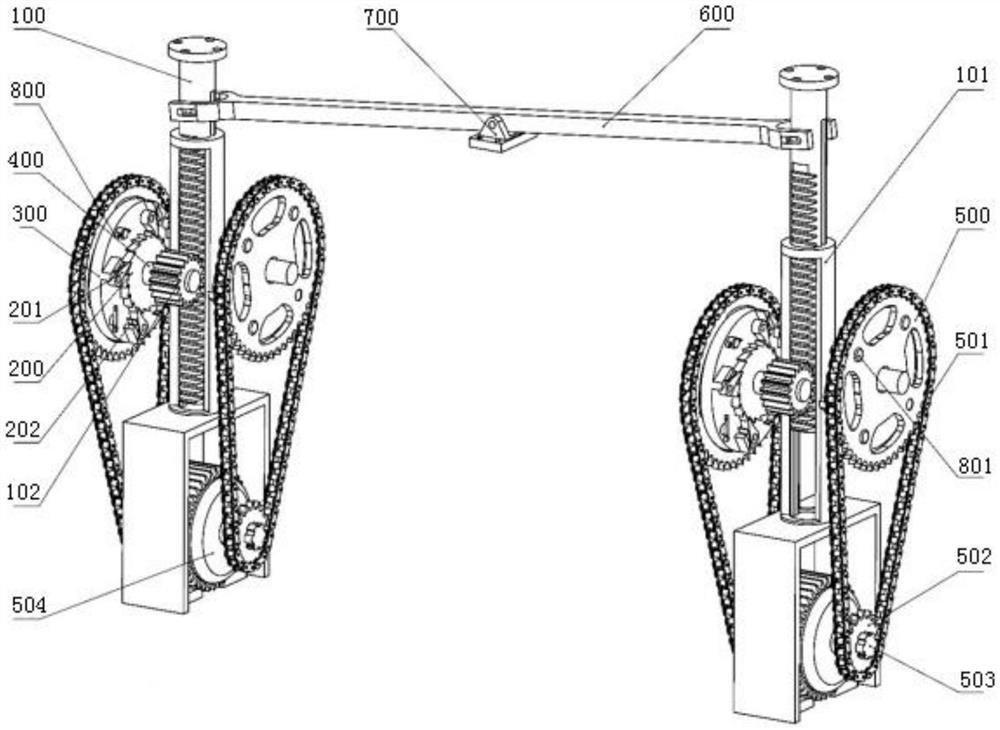
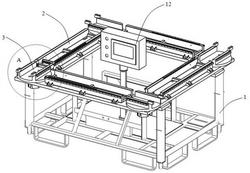
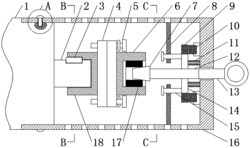
图2为本发明电源接触控制装置的结构示意图。
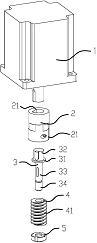
图3为本发明电源接触控制装置的详细结构示意图。
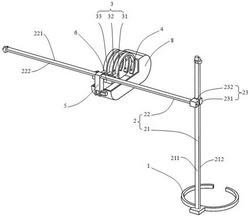
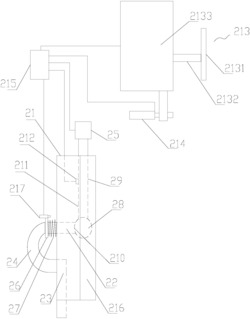
图4为本发明电源接触控制装置的工作状态图。
图中:转动支撑轴-1、电源接触控制装置-2、接触装置支撑架-3、支撑架固定块-4、转动支撑盘-5、转动定位架-6、定位架固定头-7、电动机接电箱-8、电动机接电箱连接架-9、主机底座-10、接触检测器-21、电信号转换装置-22、前部传动装置-23、卡紧状态显示灯-24、中部传动系统-25、传动齿轮组-26、电源开关控制装置-27、外部固定头-28、电源接触控制外壳-29、电源连接线接口-210、活动接触头-211、输出接触金属头-212、主电源连接线-213、输入接触金属头-214、电流感应线圈-221、杠杆支撑架-222、杠杆复位弹簧-223、杠杆主体-224、感应磁铁-225、活动连接杆-231、水平运动滑块-232、水平运动滑轨-233、输出半齿轮-234、卡紧检测弹片-241、卡紧检测输出连接杆-242、电源连接头-243、LED电源灯-244、动力输入齿轮-251、第一传动轮-252、传动杆输入辊-253、传动轴-254、传动轴输出连接皮带-255、底部支撑底座-261、收线辊-262、输入转动齿轮-263、输出转动齿轮-264、输出转动齿轮支架-265、传动齿轮输出连接线-266、输出连接传动轮组-271、电源接触滑块-272、控制电源接触头-273、控制电源输出连接线-274、电动推杆-275、电源连通片-276、固定电源连接线-277。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
请参阅图1-图4,本发明提供一种机器人躯干与底盘的安装结构方案:其结构包括转动支撑轴1、电源接触控制装置2、接触装置支撑架3、支撑架固定块4、转动支撑盘5、转动定位架6、定位架固定头7、电动机接电箱8、电动机接电箱连接架9、主机底座10,所述主机底座10的上部设有转动支撑轴1,所述转动支撑轴1为圆柱体结构,所述转动支撑轴1的上部设有转动支撑盘5,所述转动支撑盘5为圆形结构,所述转动支撑盘5的右部设有支撑架固定块4,所述支撑架固定块4通过螺栓与转动支撑盘5固定连接,所述支撑架固定块4的后部设有接触装置支撑架3,所述接触装置支撑架3通过焊接与支撑架固定块4固定连接,所述接触装置支撑架3通过卡槽与转动支撑盘5配合,所述接触装置支撑架3的上部设有电源接触控制装置2,所述电源接触控制装置2的外壳与接触装置支撑架3为一体化结构,所述转动支撑盘5的中部设有转动定位架6,所述转动定位架6穿过主机底座10与外部的动力设备连接,所述转动定位架6的上部设有定位架固定头7,所述定位架固定头7通过螺栓和卡扣与转动定位架6固定,所述转动支撑轴1的左部设有电动机接电箱连接架9,所述电动机接电箱连接架9为空心结构,所述电动机接电箱连接架9的截面为矩形结构,所述电动机接电箱连接架9的左部与电动机接电箱8固定连接,所述电动机接电箱8的左部设有接电接口,所述转动支撑轴1的底部与主机底座10固定连接,所述主机底座10通过焊接与转动支撑轴1固定,所述转动支撑轴1的左部通过焊接与电动机接电箱连接架9连接;所述电源接触控制装置2包括接触检测器21、电信号转换装置22、前部传动装置23、卡紧状态显示灯24、中部传动系统25、传动齿轮组26、电源开关控制装置27、外部固定头28、电源接触控制外壳29、电源连接线接口210,所述电源接触控制外壳29的上部的右部设有电源连接线接口210,所述电源连接线接口210为矩形结构,所述电源连接线接口210的内部的最里面设有接触检测器21和电源接触金手指,所述接触检测器21通过电源连接线与电信号转换装置22连接,所述电信号转换装置22的下部通过活动连接杆与前部传动装置23连接,所述前部传动装置23通过齿轮与中部传动系统25的传动轮连接,所述中部传动系统25的输出端通过皮带与传动齿轮组26连接,所述传动齿轮组26的输出端与电源开关控制装置27配合,所述电源接触开关装置27固定设在电源接触控制外壳29的右下部,所述电源接触控制外壳29的各个部件通过螺栓与电源接触控制外壳29固定连接,所述电源连接线接口210的下部设有卡紧状态显示灯24,所述接触检测器21包括活动接触头211、输出接触金属头212、主电源连接线213、输入接触金属头214,所述活动接触头211通过定位架与电源连接线接口210配合,所述活动接触头211的左端与输出接触金属头212固定连接,所述输出接触金属头212与输入接触金属头214配合,所述输入接触金属头214通过电源连接线与电信号转换装置22连接,所述主电源连接线213与电源开关控制装置27串联,所述电信号转换装置22包括电流感应线圈221、杠杆支撑架222、杠杆复位弹簧223、杠杆主体224、感应磁铁225,所述电流感应线圈221设在电信号转换装置22的底座上,所述电流感应线圈221的下方设有杠杆支撑架222,所述杠杆支撑架222的下方设有杠杆复位弹簧223,所述杠杆复位弹簧223的右端与杠杆主体224连接,所述杠杆主体224的中部与杠杆支撑架222连接,所述杠杆支撑架222通过轴承与杠杆主体224活动连接,所述电流感应线圈221与感应磁铁225配合,所述感应磁铁225通过胶水与杠杆主体224固定连接,所述前部传动装置23包括活动连接杆231、水平运动滑块232、水平运动滑轨233、输出半齿轮234,所述杠杆主体224与活动连接杆231活动连接,所述活动连接杆231与水平运动滑块232连接,所述水平运动滑块232的下部与水平运动滑轨233配合,所述水平运动滑块232上部的连接齿与输出半齿轮234配合,所述卡紧状态显示灯24包括卡紧检测弹片241、卡紧检测输出连接杆242、电源连接头243、LED电源灯244,所述卡紧检测弹片241通过连接线与卡紧检测输出连接杆242配合,所述卡紧检测输出连接杆242与电源连接头243连接,所述电源连接头243的右边设有LED电源灯244,所述中部传动系统25包括动力输入齿轮251、第一传动轮252、传动杆输入辊253、传动轴254、传动轴输出连接皮带255,所述动力输入齿轮251与输出半齿轮234配合,所述动力输入齿轮251通过连接线与第一传动轮252连接,所述第一传动轮252的输出连接线与传动杆输入辊253配合,所述传动杆输入辊253设在传动轴254的右端,所述传动轴254的左部的输出辊通过传动轴输出连接皮带255与传动齿轮组26连接,所述传动齿轮组26包括底部支撑底座261、收线辊262、输入转动齿轮263、输出转动齿轮264、输出转动齿轮支架265、传动齿轮输出连接线266,所述底部支撑底座261通过螺栓与电源接触控制外壳29固定连接,所述底部支撑底座261的上部设有收线辊262,所述收线辊262通过轴承与底部支撑底座261活动连接,所述收线辊262的上部固定设有输入转动齿轮263,所述输入转动齿轮263的上部设有输出转动齿轮264,所述输出转动齿轮264与输入转动齿轮263啮合,所述输出转动齿轮264的中部设有皮带连接辊与传动齿轮输出连接线266配合,所述输出转动齿轮264通过轴承与输出转动齿轮支架265固定连接,所述电源开关控制装置27包括输出连接传动轮组271、电源接触滑块272、控制电源接触头273、控制电源输出连接线274、电动推杆275、电源连通片276、固定电源连接线277,所述输出连接传动轮组271与电源接触滑块272连接,所述电源接触滑块272上设有控制电源接触头273,所述固定的控制电源接触头273通过控制电源输出连接线274与电动推杆275连接,所述电动推杆275的输出杆上设有电源连通片276,所述电源连通片276与固定电源连接线277配合。
本专利所说的机器人是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
使用时,首先检查各部分是否稳固连接,确认设备完好之后,将设备放置在合适的位置,连接电源,调节工作状态和工作参数,之后即可开始正常工作,设有电源接触控制装置2,设备在正常安装时,将主机底座10使用螺栓固定在支架上,之后将转动定位架6的底部与转动控制电机连接,然后将电源接触控制装置2与电源连接线连接,之后将插头插入电源连接线接口210的内部,插头插入时,会将活动接触头211向左推,从而使输出接触金属头212与输入接触金属头214接触,连通电源,电流从连接线流至电流感应线圈221,电流感应线圈221产生磁场将杠杆主体224、感应磁铁225向左吸引,从而杠杆主体224克服杠杆复位弹簧223的阻力逆时针转动从而将活动连接杆231、水平运动滑块232向右推,活动连接杆231、水平运动滑块232向右运动时带动输出半齿轮234逆时针转动,当转动到一定的角度时可以带动动力输入齿轮251转动,之后动力输入齿轮251通过连接线带动第一传动轮252、传动杆输入辊253转动,第一传动轮252、传动杆输入辊253转动时会带动传动轴254、传动轴输出连接皮带255一起转动,从而带动收线辊262、输入转动齿轮263转动,收线辊262、输入转动齿轮263转动时带动输出转动齿轮264转动,输出转动齿轮264通过连接线带动输出连接传动轮组271转动,从而带动电源接触滑块272向上运动使控制电源接触头273接触,连通电动推杆275的电源,电动推杆275开始工作将电源连通片276向上推,当电源连通片276与固定电源连接线277接触时,整个电路的电源连通,可以有效的提高了设备的工作的稳定性和可靠性,当电源连接线接触不良或者没有插到底时自动断开,有效的提高了设备的使用的安全性和可靠性。
本发明解决的问题是现有设备工作时,电源连接线在工作的过程中容易脱落,可能会导致设备突然断电损坏设备,本发明通过上述部件的互相组合,可以有效的提高了设备的工作的稳定性和可靠性,当电源连接线接触不良或者没有插到底时自动断开,有效的提高了设备的使用的安全性和可靠性。
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
一种机器人躯干与底盘的安装结构专利购买费用说明
![]()
Q:办理专利转让的流程及所需资料
A:专利权人变更需要办理著录项目变更手续,有代理机构的,变更手续应当由代理机构办理。
1:专利变更应当使用专利局统一制作的“著录项目变更申报书”提出。
2:按规定缴纳著录项目变更手续费。
3:同时提交相关证明文件原件。
4:专利权转移的,变更后的专利权人委托新专利代理机构的,应当提交变更后的全体专利申请人签字或者盖章的委托书。
Q:专利著录项目变更费用如何缴交
A:(1)直接到国家知识产权局受理大厅收费窗口缴纳,(2)通过代办处缴纳,(3)通过邮局或者银行汇款,更多缴纳方式
Q:专利转让变更,多久能出结果
A:著录项目变更请求书递交后,一般1-2个月左右就会收到通知,国家知识产权局会下达《转让手续合格通知书》。








动态评分
0.0